страница 1
СЕДЬМАЯ МЕЖДУНАРОДНАЯ КОНФЕРЕНЦИЯ
«ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В ПРОМЫШЛЕННОСТИ» (ITI*2012)
30 октября – 1 ноября 2012 г., Минск, Беларусь
-
Посвящается 100-летию со дня рождения
выдающегося ученого , крупного организатора
науки в Республике Беларусь
Георгия Константиновича Горанского
(1912 – 1999)
|
ОРГАНИЗАТОРЫ КОНФЕРЕНЦИИ
• Национальная академия наук Беларуси
• Объединенный институт проблем информатики Национальной академии наук Беларуси
• Объединенный институт машиностроения Национальной академии наук Беларуси
• Министерство промышленности Республики Беларусь
• Министерство образования Республики Беларусь
• Белорусский национальный технический университет
• Белорусский государственный университет
ТЕМАТИКА КОНФЕРЕНЦИИ
• Промышленные информационные технологии, качество и конкурентоспособность продукции.
• Научно-методические и системные аспекты разработки и внедрения информационных технологий в промышленности.
• Опыт создания и использования информационных технологий на промышленных предприятиях, в проектно-конструкторских и технологических организациях.
• Информационная безопасность продуктов и систем информационных технологий.
• Математическое моделирование объектов и процессов, в том числе на высокопроизводительных многопроцессорных вычислительных системах..
• Проблемы создания моделей деталей и сборочных единиц.
• Анализ и синтез объектов проектирования, производства и управления.
• Автоматизация проектирования машиностроительных конструкций и технологий их изготовления.
• Автоматизация проектирования и производства микроэлектронных и радиоэлектронных изделий.
• Экспертные системы и системы поддержки принятия проектных решений в информационных технологиях.
• Модели и методы оптимального планирования и управления производством.
• Проблемы построения и внедрения ERP/CALS-технологий на промышленных предприятиях.
• Унификация, типизация, стандартизация и сертификация в информационных технологиях.
• Кадровое обеспечение разработки и эксплуатации продуктов и систем информационных технологий.
Рабочие языки конференции – русский, английский.
Представление тезисов докладов – до 30 июля 2012 г. Извещение о приеме – до 30 августа 2012 г.
Возможно заочное участие в конференции.
Тезисы докладов на конференцию представляются в двух экземплярах, оформленные в соответствии с прилагаемыми требованиями, и в электронном виде. Электронная версия должна быть передана ответственному секретарю оргкомитета по электронной почте. В Теме письма обязательно указывать: Конференция ITI*2012.
Представленные тексты тезисов докладов (объемом 2 полные страницы формата A4) будут опубликованы без перепечатывания.
Требования к оформлению текста тезисов доклада на русском языке или ниже.
Текст тезисов доклада на английском языке из России, Беларуси и других стран СНГ оформляется в соответствии с вышеуказанными требованиями или ниже.
Пример оформленных тезисов доклада на русском языке или ниже.
Пример оформленных тезисов доклада на английском языке или ниже
АДРЕС КОНФЕРЕНЦИИ
220012, Республика Беларусь, Минск, ул. Сурганова, 6, ОИПИ НАН Беларуси, Конференция ITI*2012.
Председатель оргкомитета
Ковалев Михаил Яковлевич тел. +375 17 284 20 63
+375 29 384 20 63
E-mail: kovalyov_my@newman.bas-net.by
Зам. председателя оргкомитета
Губич Лилия Васильевна тел. +375 17 284 19 62
+375 20 642 20 66
E-mail: gubi@newman.bas-net.by
Ответственный секретарь оргкомитета
Петровский Альберт Иванович тел. +375 17 284 21 24
+375 33 668 20 66
E-mail: intech@newman.bas-net.by
Факс: +375 17 331 84 03
E-mail: intech@newman.bas-net.by
Сайт: http://uiip.bas-net.by/event/iti/iti_2012.php
ЗАЯВКА УЧАСТНИКА КОНФЕРЕНЦИИ
Заявка участника конференции должна включать следующие сведения:
– фамилия, имя, отчество;
– место работы и должность;
– название доклада;
– почтовый адрес;
– логин в Skype;
– e-mail;
– номера телефонов (сотового и стационарного).
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ ТЕКСТА ТЕЗИСОВ ДОКЛАДА
НА СЕДЬМУЮ МЕЖДУНАРОДНУЮ КОНФЕРЕНЦИЮ
«ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В ПРОМЫШЛЕННОСТИ» (ITI*2012)
Параметры страницы и поля
Бумага формата А4, размеры – 21,0 29,7 см.
Поля: верхнее – 2,5 см, нижнее – 3,2 см, левое – 3 см, правое – 2,5 см.
Текст должен входить в рамку 15,5 x 24 см.
Формат текста
Использовать шрифт 14 pt “Times New Roman Cyr”.
Интервал между строками – одинарный.
Абзацный отступ – 1,0 см.
Объем тезисов - не более двух, по возможности, полных страниц.
Страницы не нумеровать.
Заглавие
Первая строка – прижатый к левому краю УДК, следом за которым приводится один или более классификационных признаков.
С третьей строки прописным полужирным шрифтом 14 pt Times New Roman Cyr без переносов по центру строки записывается название тезисов доклада.
После названия тезисов доклада через пробельную строку по центру строки шрифтом 14 pt Times New Roman Cyr без переносов указывается(ются) И.О. Фамилия(и) автора(ов).
Со следующей строки отдельными абзацами для каждой организации шрифтом 14 pt Times New Roman Cyr по центру строки без переносов указывается название организации, страна и город, откуда представлены тезисы доклада, и e-mail. Адрес электронной почты обязательно указывать только для контактного лица.
Текст тезисов доклада
Через пробельную строку после заглавных сведений шрифтом 14 pt Times New Roman Cyr с переносами по ширине с абзацными отступами 1,0 см. печатается текст тезисов доклада.
Таблицы и рисунки (обязательно черно-белые), встречающиеся в тексте, нумеруются и снабжаются подписями (шрифт 12 pt): таблицы – сверху, а рисунки – снизу, как показано на примере.
Таблица 1
Эффект сокращения перебора: l - мощность исходного множества; k - число рассматриваемых подмножеств;
t - общее время минимизации, с
Мощность
|
Без сокращения перебора
|
С сокращением перебора
|
l
|
k
|
t
|
k
|
t
|
19
|
208
|
3,18
|
23
|
1,84
|
36
|
1326
|
24,73
|
96
|
14,59
|
Рис. 1. Графическое изображение элементов параллельных
алгоритмов: а) элемент разветвления; б) элемент слияния;
в) упрощенное изображение элемента слияния;
г) комбинированный элемент
При наличии цитируемых источников через пробельную строку после основного текста строчным полужирным прибитым к левому краю страницы записывается
Список литературы.
Следом, отдельными абзацами, дается библиографическое описание источников в соответствии с приведенными ниже образцами.
Один, два или три автора
1. Петьков, А.А. Поддержка принятия решений при построении системы контроля воздушного пространства государства / А.А. Петьков // Информатика. – 2004. – № 1. – С. 72–81.
2. Кокс, Д. Теоретическая статистика / Д. Кокс, Д. Хинкли. – М. : Мир, 1978. – 560 с.
5. Hjelmas, F. Face detection: a survey / F. Hjelmas, T. Low, T. Smith // Computer vision and image understanding. – 2001. – Vol. 83, № 3. – P. 236–274.
6. Lisboa, P.J.G. Invariant character recognition: Comparison of Zernike moment and high order neural networks / P.J.G. Lisboa, S.J. Perantonis // Proc. of the Int. joint conf. on neural networks. – Singapore, 1991. – P. 1421–1425.
Четыре и более авторов
3. Критерии оценки эффективности автоматизированных дактилоскопических идентификационных систем / А.С. Боков [и др.] // Методы, алгоритмы и программное обеспечение: сб. науч. тр. – Минск: Изд-во БГУ, 1999. – С. 105–122.
Ресурсы удаленного доступа
6. Зеленков, Ю.А. Введение в базы данных / Ю.А. Зеленков // Мурманский государственный технический университет [Электронный ресурс]. – 1997. – Режим доступа: http://www.mstu.edu.ru/education/materials/zelenkov/toc.html. – Дата доступа : 01.05.2006.
7. Departament of the Nevy Automated Information Systems, USA [Electronic resource]. – Mode of access: www.cs.nps.navy.mil/curricula/tracks/security/AISGuide/ navch08.txt. – Date of access : 02.09.2008.
10. Berkeley PLA test set [Electronic resource]. – Mode of access: http://www1.cs.columbia.edu/~cs4861/sis/espresso-examples/. – Date of access: 03.05.2006.
Пример оформленных тезисов доклада на русском языке или ниже.
Пример оформленных тезисов доклада на английском языке или ниже
УДК 658.512.22.011.56; 539/.6
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ И ГЕОМЕТРИИ ЛОКАЛИЗОВАННЫХ НЕОДНОРОДНОСТЕЙ В УПРУГИХ ТЕЛАХ НА ОСНОВЕ КОНЕЧНО-ЭЛЕМЕНТНОГО
МОДЕЛИРОВАНИЯ
Ю.В. Напрасникова1, В.А. Кочуров1, В.В. Напрасников1,
Д.М. Шестак1, А.Н. Соловьев2
1Белорусский национальный технический университет, Минск, Беларусь, vkochurov@tut.by;
2Донской государственный технологический университет, Ростов-на-Дону, Россия
Во многих случаях приходится решать задачу по определению наличия и формы полости или другого включения, имеющего характеристики материала, отличные от тех, которыми обладает основной материал конструкции [1].
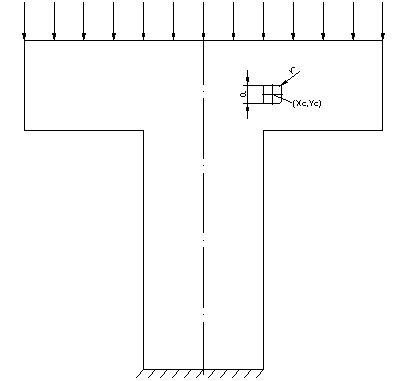
Рассматривается схема разработанного программного обеспечения и пример его использования для определения параметров неоднородности (трещина, разлом, инородное тело), расположенной в опорной балке-стенке с учетом действующих нагрузок и закреплений (рис. 1).
а) б)
Рис. 1. Конструкция (а) и ее конечно-элементное представление (б)
В рассматриваемом примере предполагается, что неоднородность имеет форму квадрата со стороной a, со скругленными углами радиусом r. Расположение этой неоднородности (координаты центра Xc, Yc), размер (a, r) и материал (E) считаются неизвестными и подбираются путем итерационных уточнений на основе оптимизационного алгоритма. Опорная балка закреплена на нижней кромке. Сверху приложено давление.
Область поиска возможного решения ограничена размерами балки-стенки.
Минимизируемой величиной является сумма квадратов разностей полученных и замеренных перемещений контура.
Программа оптимизации на основе алгоритма Хука-Дживса (поиск по образцу) завершает свою работу, если при подобранных параметрах неоднородности сумма квадратов разностей исходных и полученных перемещений опорной балки-стенки будет минимальна. Критерий оптимальности имеет вид
где U – перемещения в точке.
По замеренным величинам предварительно строится сплайн, позволяющий вычислять перемещения в любой точке границы (рис. 2).
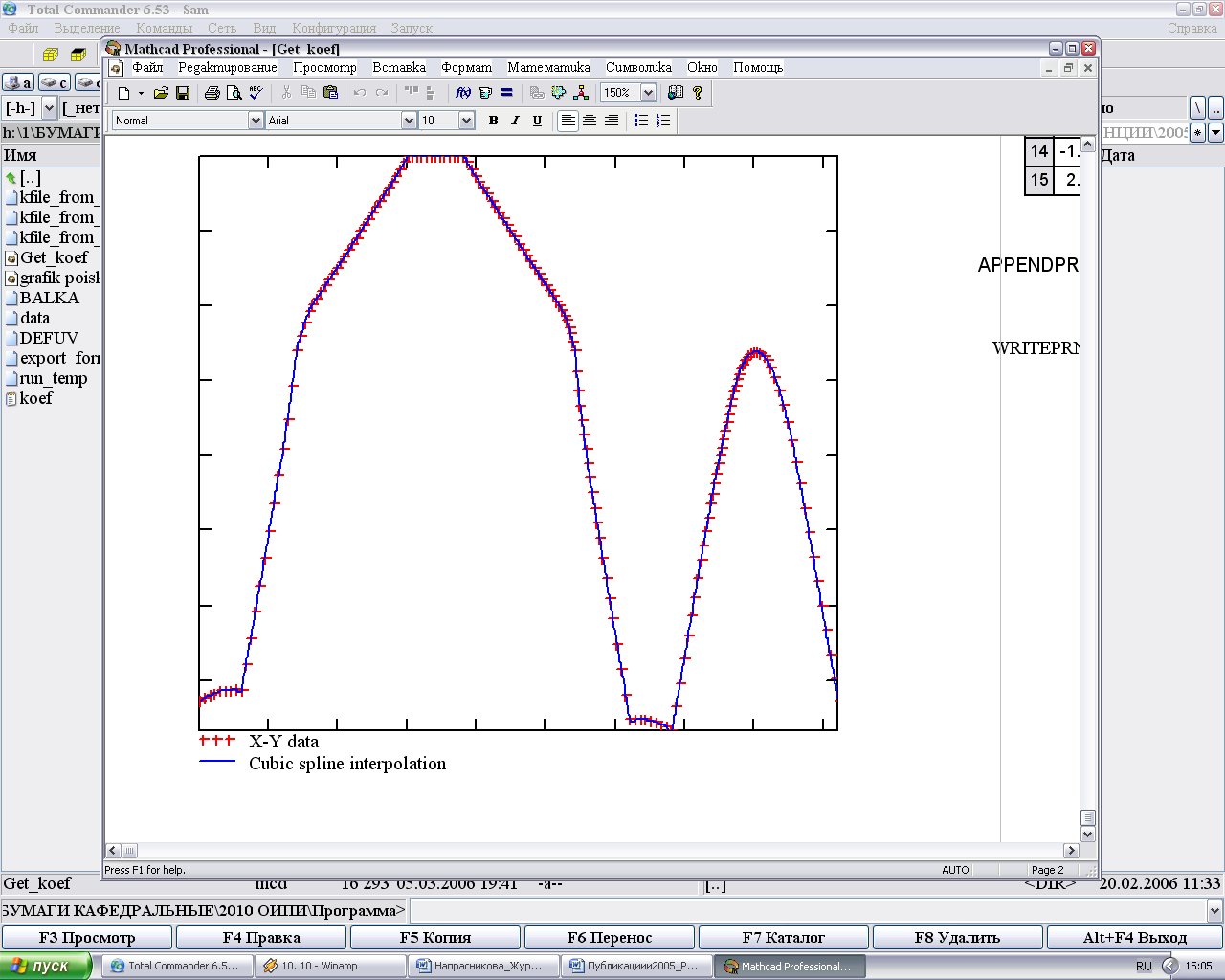 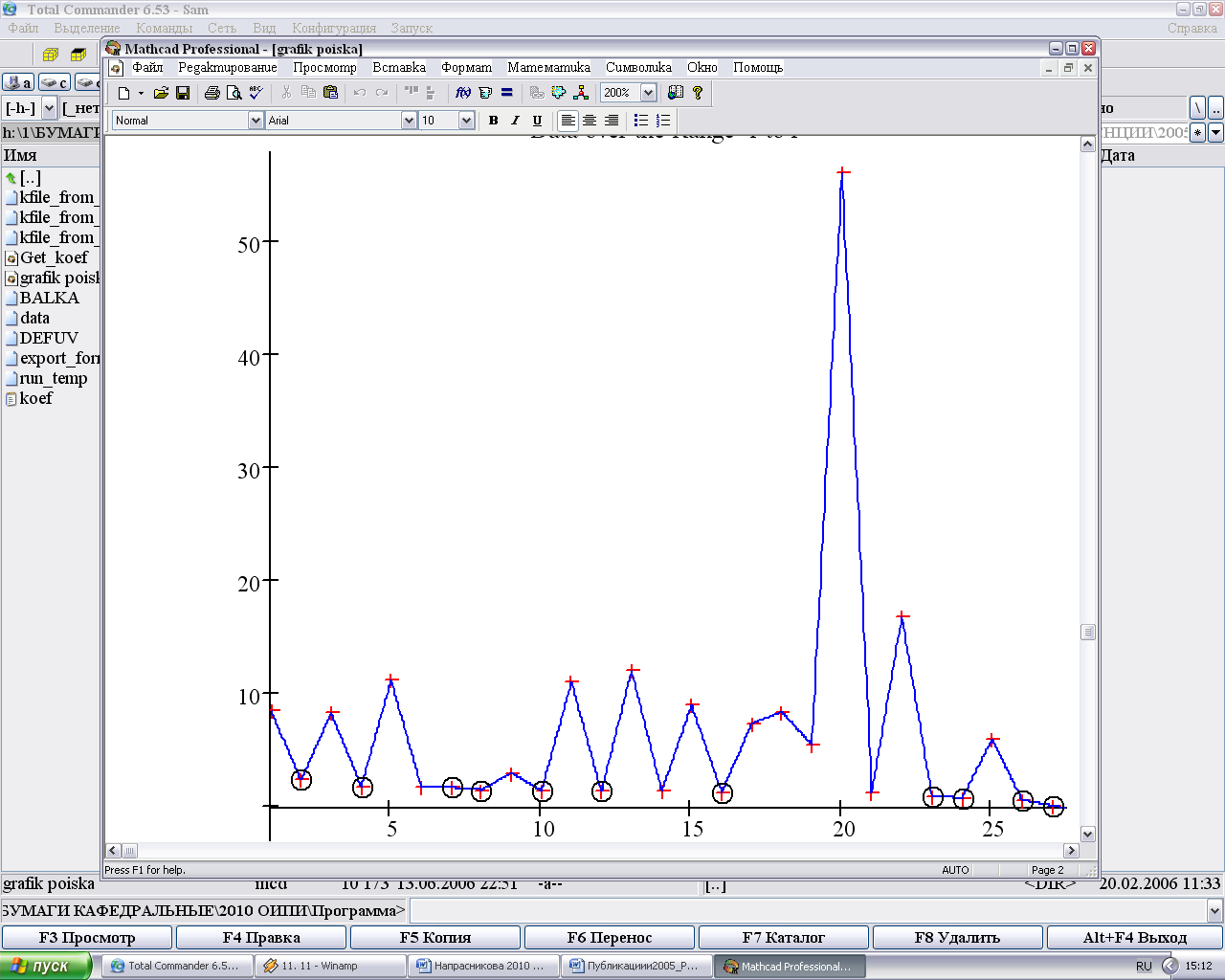
Рис. 2. Пример сплайна Рис. 3. Ход оптимизации
Задача считается решенной, если при подобранных параметрах неоднородности сумма квадратов разностей исходных и полученных перемещений опорной балки-стенки будет минимальна при требуемой точности. Ход оптимизации представлен на рис. 3.
Список литературы
1. Определение физических свойств локализованных неоднородностей в упругих телах и живых тканях с помощью генетических алгоритмов / А.Н. Соловьев [и др.] // Математическое моделирование и биомеханика в современном университете: труды междунар. школы-семинара, пос. Абрау-Дюрсо, 23-27 мая 2005 г. – Ростов-на-Дону: Гефест, 2005. – С. 46.
УДК 65-50
System Control, Based on The Artificial Intelligence Techniques
S.E. Alavi, Y.N. Petrenko
Belarusian National Technical University, Minsk, Belarus, vpetrenko@bntu.by
1. Fuzzy Logic Controller design
Fuzzy Logic Systems (FLS)s are rule-based systems in which an input is first fuzzified (i.e.,converted from a crisp number to a fuzzy set) and subsequently processed by an inference engine that retrieves knowledge in the form of fuzzy rules contained in a rule-base. The fuzzy sets computed by the fuzzy inference as the output of each rule are then composed and defuzzified (i.e., converted from a fuzzy set to a crisp number).
A fuzzy logic system is a nonlinear mapping from the input to the output space.
2. Fuzzy IF-THEN Rule Base
IF-THEN rules are able to be obtained by trial and error, by the knowledge about the system, and by intuition of designer about the system. Unlike other motor control systems or car speed control systems, the flexible manipulator has another performance constraints.We can show fuzzy rules IF-THEN in table too. Defuzzification operation can be performed by a number of methods of which the center of gravity (also known as centroid) and height methods are common [1-4]. A centroid defuzzification method calculates the output crispy value corresponding to the center of gravity of the output membership function, which is given by the general shape or another one that we need.
3. Genetic Algorithms (GA)
A GA’s starts with a population of randomly generated solutions, chromosomes and advances toward better solutions by applying genetic operators, modeled on the genetic processes occurring in nature. In these algorithms we maintain a population of solutions for a given problem; this population undergoes evolution in a form of natural selection. In each generation, relatively good solutions reproduce to give off springs that replace the relatively bad solutions which die. An evaluation or fitness function plays the role of the environment to distinguish between good and bad solutions. The process of going from the current population to the next population constitutes one generation in the execution of a genetic algorithm. Although there are many possible variants of the basic GA, the fundamental underlying mechanism operates on a population of chromosomes or individuals (representing possible solutions to the problem) and consists of three operations: 1.Evaluation of individual fitness, 2.Formation of a gene pool (intermediate population ) 3.Recombination and mutation.
4. Neural Networks
In general, a neural model is mathematically represented by a basis function (net function) and an activation function (neuron function), shown in Figure. The selection of these functions often depends on the applications of the neural network. In other words, application-driven neural models are only loosely tied to the biological realities [1,5].
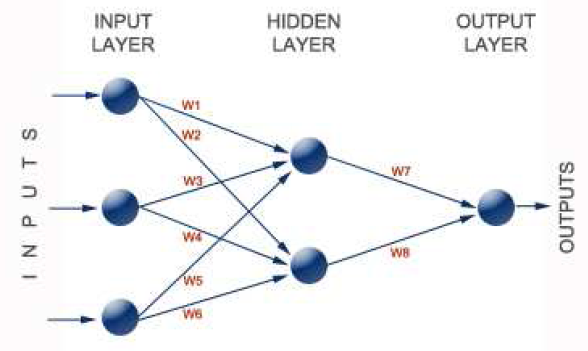
Fig. 1 Typical neural network structure
The authors have emphasized their attention on over-head crane control system based on fuzzy and Genetic Algorithms [2, 3, 4].
References
1. Bose, B. Power Electronics and Variable Frequency Drives / Bimal Bose . – N.Y.: IEEE, 1996. – 640 p.
2. Алави, С.Э. Управление подъемным краном с использованием нечеткого логического диспетчера / С.Э. Алави, Ю.Н. Петренко // Энергетика (Изв. высш. учеб. заведений и энерг. объединений СНГ). – 2008. –№ 6. – С. 37–42.
3. Алави, С. Э. Контроллер позиционного электропривода на основе нечеткой логики / С.Э. Алави, Ю.Н. Петренко // Труды БГТУ. Сер. IX. – Вып. XVI. – 2008. – С. 49–52.
4. Alavi, S.E. Fuzzy logic controller for non-linear system design / S.E. Alavi, Y.N. Petrenko // Информационные технологии в промышленности (ITI*2008): тез. докл. Пятой Международной науч.-техн. конф. – Минск: ОИПИ НАН Беларуси, 2008. – С. 214–215.
5. Rajashekara, K. Sensorless Control off AC Motor Drives. Piscataway / K. Rajashekara, A. Kawamura, K. Matsuse. – NJ: IEEE, 1996. – 540 р.
страница 1
|
