страница 1 | страница 2 страница 3 страница 4 | страница 5 | страница 6
СПИСОК ЛИТЕРАТУРЫ
1. Брейдо И.В., Сагитов Л.И., Фешин Б.Н. Классификационные признаки систем управления электротехническими комплексами и системами // Тр. ун-та; КарГТУ. Караганда, 2002. №.2. С. 55-57.
2. Фешин Б.Н., Паршина Г.И. Дистанционные системы повышения качества подготовки персонала инженерных служб электротехнических комплексов горно-рудных предприятий // Тр. ун-та; КарГТУ. Караганда, 2008. №.4. С. 98-101.
3. Правила безопасности в угольных и сланцевых шахтах. Астана, 2000.
4. Правила безопасности в угольных и сланцевых шахтах. М.: Недра, 1986.
5. Дзюбан В.С. Справочник электроэнергетика угольной шахты. М.: Недра, 1983.
6. Чумаков В.А. Руководство по ревизии, наладке и испытанию подземных электроустановок шахт. М.: Недра, 1989.
7. Фешин Б.Н., Паршина Г.И., Калинин А.А. Задачи разработки компьютерной системы контроля, диагностики и супервизорного управления электроснабжением угольных технологических участков угольных шахт // Тр. международной научной конференции «Наука и образование ведущий – фактор стратегии «Казахстан-2030», посвященной 100-летию со дня рождения академика К.И. Сатпаева (29-30 июня 1999г.). Караганда, 1999. С. 75-78.
8. Фешин Б.Н., Паршина Г.И., Структура экспертных систем оценки качества знаний сотрудников электротехнических служб горно-рудных предприятий // Тр. ун-та; КарГТУ. Караганда, 2009. №.4. С. 88-90.
9. Фешин Б.Н., Паршина Г.И., Критерии оценки качества знаний персонала инженерных служб электротехнических комплексов горно-рудных предприятий // Тр. ун-та; КарГТУ. Караганда, 2010. №.2. С. 95-100.
УДК 62-83.621.679
|
|
ДАЙЧ Л.И.,
СИЧКАРЕНКО А.В.,
ЛИСИЦЫН Д.В.
| Особенности построения системы управления
4-квадрантным электроприводом постоянного тока |
В современных системах управления широкое распространение получили РID-контроллеры. При синтезе систем управления двигателем постоянного тока с тиристорным преобразователем и РID-регулятором не учитываются нелинейные свойства тиристорного преобразователя и двигателя. Также не учитываются процессы перехода между двигательными и генераторными режимами. При синтезе систем управления привод анализируется отдельно в двигательных и генераторных режимах. Наличие нелинейных элементов, изменение передаточной функции объекта управления в двигательных и генераторных режимах, изменение направления тока в цепях якоря или возбуждения при переходе между режимами существенно снижает адекватность модели с РID-регулятором при решении отдельных практических задач. Проведенные исследования системы регулирования двигателем постоянного тока с независимым возбуждением и тиристорным преобразователем в ППП MATLAB и Simulink показали, что настроечные параметры РID-регулятора, полученные в процессе синтеза системы, не обеспечивают заданного быстродействия. Оптимизация параметров регулятора средствами Simulink, входящего в ППП MATLAB, показала, что заданное быстродействие системы может быть достигнуто в рассматриваемой системе.
Применение адаптивных систем управления, изменяющих свою структуру или параметры при изменении рабочих режимов, позволяет получить высокие показатели качества переходных процессов. Но синтез таких систем, особенно с учетом нелинейных характеристик отдельных звеньев и изменений их передаточных функций, представляет определенные трудности.
Все это, с учетом изменяющихся электромагнитной и электромеханической инерционностей, делает необходимым применение «интеллектуальных» систем управления. В последнее время получили большое распространение нечеткие системы управления, позволяющие при минимальных данных об объекте регулирования и изменяющихся параметрах системы получить приемлемый вид переходных процессов. Нечеткие системы управления занимают промежуточное положение между классическими системами и искусственными нейронными системами. Однако избыточность вариантов при построении нечетких систем и отсутствие разработанных методик построения регуляторов не позволяют широко использовать данный метод в 4-квадрантном электроприводе.
Рассмотрим особенности построения модели системы нечеткого управления с целью решения практических задач по управлению двигателем постоянного тока независимого возбуждения с тиристорным преобразователем и возможностью переходов между двигательными и генераторными режимами.
Разрабатываемая система управления 4-квадрантным электроприводом постоянного тока должна обеспечить:
- максимальное быстродействие;
- минимальное перерегулирование;
- нулевую ошибку регулирования частоты вращения;
- ограничение предельного тока двигателя;
- переход между режимами при изменении знака и величины момента на валу двигателя в пределах 4-х квадрантов.
На рисунке приведена структурная схема системы управления двигателем постоянного тока (ДПТ) с учетом всех вышеизложенных требований.
В связи с большим разнообразием параметров, учитываемых при построении нечетких регуляторов: количества входных и выходных лингвистических переменных (контролируемых и управляющих параметров), количества термов для каждой из входных и выходных лингвистических переменных, вида функций принадлежностей, соотношения между функциями принадлежностей в каждом конкретном случае, возможности применения различных баз правил для одного процесса, возникает необходимость формирования рекомендаций по последовательности создания нечетких регуляторов для определенных областей применения.
На первом этапе для разрабатываемой системы управления, исходя из требований к заданному процессу, необходимо описать лингвистические переменные, которые будете использованы. Затем описать стратегию управления посредством нечетких правил, которые объединяют в единую базу правил или знаний о системе. Как правило, количество терм и соответствующих им функций принадлежности нечетное [2], [3], [4]. Минимальное количество функций принадлежностей, имеющее практический интерес, – 3. Для произвольного параметра это: параметр в норме, параметр меньше нормы, параметр больше нормы. При таком количестве термов (функций принадлежности) регулирование протекает с большими колебательностью, перерегулированием и скоростью изменения управляющего воздействия. При выборе пяти функций принадлежности переходной процесс получается с меньшей колебательностью и перерегулированием. На динамику процесса регулирования существенное влияние оказывает соотношение между функциями принадлежности. Увеличение диапазона функций принадлежности от центрального терма к боковым позволяет при высоком быстродействии получить минимальные перерегулирование и колебательность, но при этом увеличивается скорость нарастания сигнала управления при больших отклонениях выходной величины от заданной. Дальнейшее увеличение количества термов в терммножестве приводит к неоправданному увеличению базы правил и потере преимущества нечетких регуляторов.
В качестве примера разработки системы нечеткого вывода для разработанной системы управления ДПТ, приведенной на рисунке, рассмотрим создание базы правил для формирования команды «R» реверс тока в цепи обмотки возбуждения.
Применяемые лингвистические переменные:
- R команда на реверс тока в цепи обмотки возбуждения;
- Х сигнал рассогласования;
- Х' скорость изменения сигнала рассогласования.
Лингвистическая переменная R может принимать два значения: 0, если вращение осуществляется в заданном направлении, и 1, если необходимо изменить направление вращения. В связи с тем, что переменная R может занимать только 2 значения, выбираем для
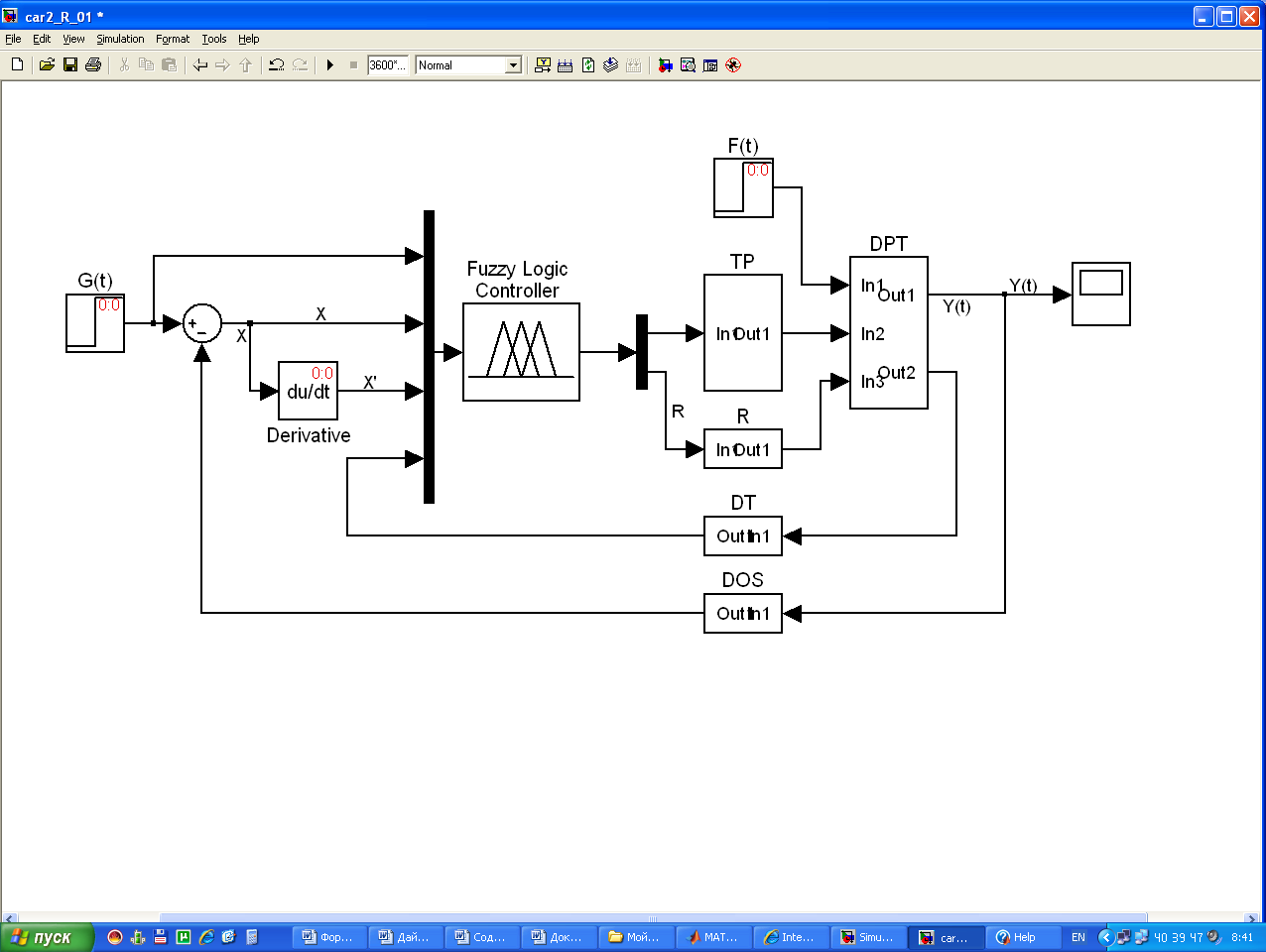
Структурная схема разработанной системы управления ДПТ
терммножества одну S-образную функцию принадлежности.
Лингвистическая переменная Х может иметь как положительные, так и отрицательные значения. Положительное значение сигнала Х свидетельствует о соответствии направления вращения заданному. Отрицательное значение отражает несоответствие действительного направления вращения заданному. Для лингвистической переменной Х выберем три функции принадлежности терммножества в связи с тем, что в зависимости от этой переменной не требуется регулирования лингвистической переменной R.
Лингвистическая переменная Х' также может иметь как положительные, так и отрицательные значения. Положительное значение сигнала Х' свидетельствует об увеличении сигнала рассогласования, а отрицательное об уменьшении. Для лингвистической переменной Х' также выберем три функции принадлежности терммножества.
В таблице приведены возможные варианты соответствия терммножеств рассмотренных лингвистических переменных.
Анализируя условия, приведенные в таблице, сформируем базу правил, состоящую из трех правил:
1 Если Х равен 0 или sign(Х) противоположен sign(Х'), то ничего не происходит. Условия1-3, 6 и 8.
2 Если sign(Х) меньше 0 и sign(Х') не положительный, то необходимо осуществить реверс. Условия 4 и 5.
3 Если sign(Х) больше 0 и sign(Х') не отрицательный, то необходимо вернуться к базовому направлению вращения. Условия 7 и 9.
Условия 1-9, приведенные в таблице 1, соответствуют возможным пересечениям терммножеств заданных лингвистических переменных. Увеличение количества термов в терммножествах приведет к увеличению количества вариантов их пересечений, что в свою очередь увеличит количество правил в базе правил. Увеличение количества правил приводит к снижению быстродействия регулятора, увеличению вероятности возникновения ошибок при составлении базы. Также необходимо помнить об ограничении количества правил в базах микроконтроллеров, поддерживающих нечеткую логику.
По результатам выполненного анализа сформулированы следующие требования к нечеткой системе управления:
1. В качестве контролируемых параметров выбираем сигналы: управления, ошибки регулирования, скорости изменения ошибки, тока двигателя, текущего направления вращения.
2. Для сигнала управления и основного контролируемого параметра – частоты вращения – выбираем по пять функций принадлежности соответствующих терммножеств.
3. Для сигналов ошибки регулирования и скорости изменения ошибки достаточно выбрать по три функции принадлежности.
4. Для сигнала тока двигателя и сигнала текущего направления вращения выбираем по одной S-образной [3] функции принадлежности.
Следует отметить, что на динамику переходного процесса независимо от структуры нечеткого регулятора и выбранных терммножеств существенное влияние оказывает разработанная база правил.
Моделирование системы проводилось в пакете расширения Fuzzy Logic Toolbox, входящем в MATLAB.
Создание базы правил необходимо проводить последовательно, начиная с модели одноконтурной системы для сигнала частоты вращения. Затем проверяется работоспособность системы во всем диапазоне изменения задающего и возмущающего воздействий. Первичная проверка правильности созданной базы правил проводится в отладочном окне редактора FIS, входящего в пакет расширения Fuzzy Logic Toolbox. Изменение значения входной координаты в выбранном диапазоне и анализ изменения выходной координаты позволяет оценить адекватность разработанной модели и работоспособности нечеткого регулятора. Для оценки адекватности модели применяется метод экспертных оценок. При удовлетворительном характере переходного процесса дополняем базу правил условиями для сигнала задающего воздействия, затем для сигнала тока двигателя. Оценка адекватности модели проводится аналогично модели одноконтурной системы.
Аналогично проводим создание базы правил для следующей выходной переменной, формирующей команду на переход в генераторные режимы.
После создания базы правил для всех переменных необходимо провести итоговое моделирование системы управления в особых режимах работы 4-квадрантного электропривода и по переходным характеристикам оценить качество регулирования и соответствие работы системы заданным требованиям.
Возможные варианты соответствия лингвистических переменных при формировании команды «R» реверс
Номер
условия
|
Лингвистические переменные
|
Рассогласование
|
Скорость изменения рассогласования
|
Сигнал на реверс (R)
|
Х
|
Х’
|
Термы для R
|
1
|
нулевая
|
нулевая
|
-
|
-
|
2
|
нулевая
|
отрицательная
|
-
|
-
|
3
|
нулевая
|
положительная
|
-
|
-
|
4
|
отрицательная
|
нулевая
|
1
|
|
5
|
отрицательная
|
отрицательная
|
1
|
|
6
|
отрицательная
|
положительная
|
-
|
-
|
7
|
положительная
|
нулевая
|
|
0
|
8
|
положительная
|
отрицательная
|
-
|
-
|
9
|
положительная
|
положительная
|
|
0
|
страница 1 | страница 2 страница 3 страница 4 | страница 5 | страница 6
|