|
|
|
страница 1 ... страница 2 | страница 3 | страница 4 страница 5 страница 6
Здесь величина постоянной составляющей на входе интегратора формирователя задающего линейно изменяемого воздействия выбирается из условия достижения аргументом номинального значения в конце периода моделирования.
Рекомендуемые при этом значения периода моделирования для ППЭП ПТ средней мощности могут быть получены из соотношения:
 (1) (1)
где ТМ – постоянная времени формирователя задающего линейно изменяемого воздействия;
ТmaxОИ – максимальная постоянная времени
объекта исследования.
Совокупность входных и выходных координат объекта исследования, их начальные условия и диапазоны изменения, величины управляющих и возмущающих воздействий определяются в каждом конкретном случае характером задач, решаемых в ходе имитационного моделирования.
Определение динамических свойств ППЭП ПТ возможно, в том числе, посредством оценки реакции объекта на единичное ступенчатое воздействие. При этом последовательность действий при выборе основных параметров моделирования рекомендуется осуществлять по приведенной ранее методике для снятия статических характеристик.
Как отмечено выше, получение ЛАЧХ и ЛФЧХ моделей электропривода, содержащих силовые полупроводниковые преобразователи, по каналу управления осложнено дискретностью характеристик элементов объекта. В данной работе предлагается методика снятия ЛАЧХ и ЛФЧХ в ППП MatLab посредством использования управляющего сигнала силового преобразователя (содержащего как постоянную составляющую, так и сигнал синусоидальной формы), с последующей селекцией гармонической составляющей выходного сигнала с помощью избирательного фильтра. Следует отметить, что предлагаемая методика реализуема только для режима непрерывного тока в силовой цепи ППЭП ПТ.
Обобщенная функциональная схема имитационной модели ППЭП ПТ для снятия логарифмических характеристик представлена на рисунке 3.
При построении динамических моделей рассматриваемых типов электропривода с целью минимизации ошибки, обусловленной работой силового полупроводникового преобразователя, рекомендуется использовать избирательный фильтр 4-го порядка. Для уменьшения искажений, вносимых избирательным фильтром, его показатель колебательности следует принять равным 1. Коэффициент передачи всего избирательного фильтра на частоте резонанса также должен быть равен 1. Фильтр, выполненный по такой схеме, не имеет фазового запаздывания на резонансной частоте [6].
С учетом рассмотренных положений получение ЛАЧХ и ЛФЧХ рекомендуется выполнять по следующей методике.
1. Выбор метода и шага интегрирования, а также погрешности измерения осуществляется по методике, аналогичной описанной выше применительно к определению статических характеристик электропривода, включая рекомендуемые значения из таблицы.
2. Диапазон изменения частоты гармонического задающего сигнала определяется условием:
 (2) (2)
где Тmin и Tmax – соответственно, минимальная и максимальная величины постоянной времени линейной части имитационной модели.
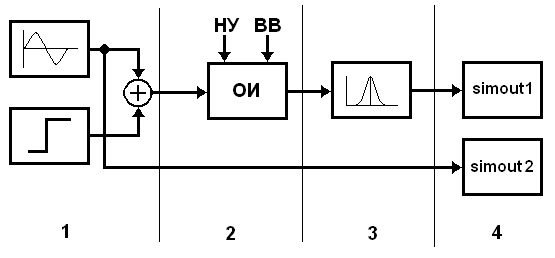
1 – формирователь задающего управляющего воздействия; 2 – ОИ – объект исследования, НУ – начальные условия, ВВ – возмущающее воздействие; 3 – избирательный фильтр; 4 – регистрирующий измерительный комплекс
Рисунок 3 – Обобщенная функциональная схема
имитационной модели ППЭП ПТ для снятия
логарифмических характеристик
Дополнительным ограничением максимальной величины частоты гармонического задающего сигнала является частота основной гармоники пульсаций тока в силовой части управляемого преобразователя.
3. Значения частот задающего гармонического сигнала следует выбирать с учетом нелинейности логарифмической шкалы из условия равенства линейных интервалов в пределах одной декады. При этом длина интервалов должна определяться целым числом, величина которого зависит от необходимой точности построения ЛАЧХ и ЛФЧХ.
4. Построение ЛАЧХ и ЛФЧХ рекомендуется осуществлять с использованием традиционных методов на основе зависимостей амплитудных значений и фазового сдвига, соответственно, между выходным и входным гармоническими регистрируемыми сигналами [2].
Таким образом, в работе предложены методики проведения имитационных экспериментов по определению статических и динамических свойств полупроводникового электропривода постоянного тока с двигателями средней мощности и построения ЛАЧХ и ЛФЧХ, которые могут быть использованы для исследования регулируемого электропривода как в двигательном, так и в генераторных режимах работы, а также при синтезе систем автоматического регулирования.
СПИСОК ЛИТЕРАТУРЫ
1. Каверин В.В. Регулировочные характеристики электропривода постоянного тока в режиме динамического торможения // Тр. ун-та; КарГТУ. Караганда, 2009. № 3. С.77-79.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. 768 с.
3. Компьютерное моделирование и идентификация электротехнических комплексов: учеб. пособие. В 3-х ч. Часть 3 / Б.Н. Фешин, Ю.Ф. Булатбаева, Г.С. Нурмаганбетова, Г.И. Паршина, Ш.З. Телбаева; Карагандинский гос. техн. ун-т. Караганда: Изд-во КарГТУ, 2010. 63 с.
4. Герман-Галкин С.Г. Силовая электроника: Лабораторные работы на ПК. – СПб: Коронапринт, 2007. 256 с.
5. Каверин В.В., Эм Г.А. Генераторные режимы регулируемого электропривода горных машин // Труды XII Международной научной конференции «Наука и образование – ведущий фактор стратегии «Казахстан-2030» (23-24 июня 2009 г.). Выпуск 2 / Министерство образования и науки РК, Карагандинский государственный технический университет. Караганда: Изд-во КарГТУ, 2009. С.225-227.
6. Хоровиц П., Хилл У. Искусство схемотехники: В 2-х т. Т.1. / Пер. с англ. М.: Мир, 1986. 598 с.
УДК 621.313.2:621.314.58
|
|
ЭМ Г.А.
| Генераторные режимы четырехквадрантного тиристорного электропривода постоянного тока |
Замечательные регулировочные свойства, жесткость механических характеристик, высокая плотность энергии и экономичность машин постоянного тока с независимым возбуждением обусловили их распространение в различных отраслях промышленности. В частности, тиристорный электропривод постоянного тока (ТЭП ПТ) используется в шахтных подъемных установках, экскаваторах, крановых механизмах, угледобывающих комбайнах, буровых установках и др. В процессе эксплуатации указанных классов горных машин и механизмов востребованы как двигательный, так и генераторные режимы работы. Причем управляемые генераторные режимы технологического торможения для большинства рассматриваемых машин носят продолжительный характер.
В таблице 1 приведена сравнительная характеристика ТЭП ПТ независимого возбуждения рассматриваемых классов горных машин и механизмов, в которой отражены, в том числе, диапазоны скорости, используемые генераторные режимы и их продолжительность, определяемые технологическими требованиями и нормативами безопасной эксплуатации [1].
Функциональная схема ТЭП ПТ с реверсом по цепи якоря приведена на рисунке 1.
Двухкомплектный (реверсивный) тиристорный преобразователь ТП, обеспечивает работу ТЭП ПТ во всех четырех квадрантах механической характеристики как в двигательном, так и в генераторных режимах. Система автоматического регулирования САР в соответствии с заданием Uз и сигналами датчиков тока BA и скорости BR вырабатывает сигнал управления Uу, подаваемый на управляющие электроды тиристоров.
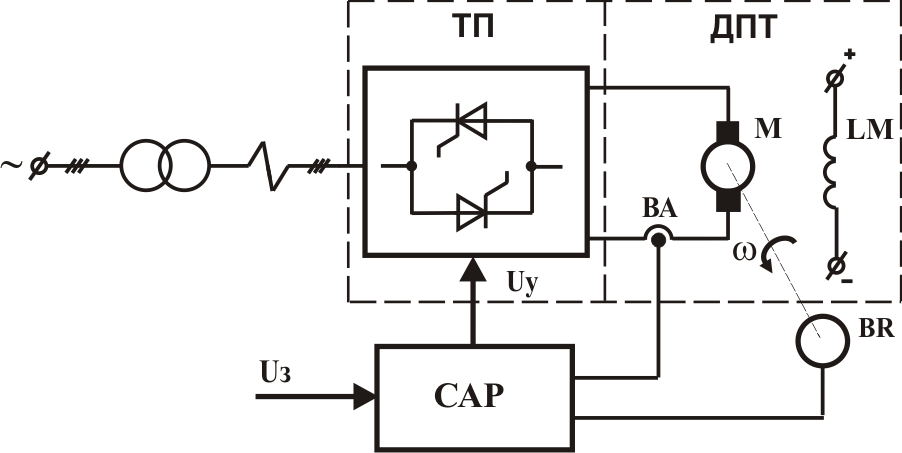
Рисунок 1 – Функциональная схема ТЭП ПТ с реверсом по цепи якоря
Двигательный режим ТЭП ПТ изучен достаточно полно. В отличие от него управляемые генераторные режимы, а также динамические свойства четырехквадрантного ТЭП ПТ при переходе из двигательного режима в генераторный и обратно в составе регулируемого четырехквадрантного электропривода исследованы в недостаточной степени [1, 2].
Как известно, в электроприводе с двигателем постоянного тока независимого возбуждения могут быть использованы три возможных генераторных режима: динамическое торможение, противовключение и ре-
Таблица 1 – Сравнительная характеристика ТЭП ПТ горных машин и механизмов
Область применения
|
Диапазон
скорости
|
Мощность
привода, кВт
|
Используемые
генераторные режимы
|
Продолжительность
генераторных режимов
|
Шахтные подъемные машины
|
1:100
|
70 – 220
|
противовключение, динамическое торможение
|
продолжительный
|
Буровые станки
|
1:10 – 1:200
|
10 – 100
|
динамическое и рекуперативное торможение
|
продолжительный, повторно-кратковременный
|
Экскаваторы
|
1:10
|
10 – 200
|
динамическое и рекуперативное торможение
|
повторно-кратковременный
|
Механизмы подачи
очистных комбайнов
|
1:25
|
10 – 60
|
противовключение, динамическое и рекуперативное торможение
|
продолжительный, кратковременный
|
Крановые механизмы
|
1:15 – 1:30
|
10 – 200
|
противовключение, динамическое торможение
|
повторно-кратковременный
|
куперативный режим (с отдачей энергии в сеть). Из них в настоящее время, несмотря на значительные потери энергии в токоограничивающих резисторах, наиболее широко применяется динамическое торможение. Системы динамического торможения обеспечивают эффективное торможение со скорости, близкой к номинальной, в то же время в электроприводах грузоподъемных машин и механизмов, где требуемый диапазон регулирования скорости изменяется от 1:15 до 1:100 [3-5], этот способ в нижней части диапазона малоэффективен. Организация динамического торможения требует также значительных затрат, связанных с дополнительными схемотехническими решениями в силовой части электропривода и системе управления. Кроме того, для электропривода средней и большой мощности, характерного для грузоподъемных машин, большие габариты токоограничивающих реостатов и теплотехнические требования к их установке вынуждают занимать значительные площади. Указанные недостатки приводят к снижению надежности и рентабельности электропривода.
Следует отметить, что для ряда горных машин и механизмов, таких как напочвенные канатные дороги, лебедки буровых станков и др., требуется управление параметрами электропривода в двигательном и генераторных режимах работы при знакопеременном моменте сил сопротивления. Обеспечение приемлемой точности стабилизации скорости и удовлетворительных динамических характеристик электропривода в этих условиях при использовании систем динамического торможения весьма проблематично. Более эффективным является генераторное торможение с рекуперацией энергии в сеть.
Однако практическое использование рекуперативного режима наталкивается на ряд технических трудностей. Так, к нерешенным вопросам применения рекуперативного торможения, в том числе, относится определение реального диапазона существования этого режима по скорости. Суть проблемы заключается в том, что в связи с односторонней проводимостью вентиля и импульсной формой напряжения на выходе управляемого выпрямителя режим рекуперативного торможения может быть реализован только тогда, когда амплитудное значение ЭДС двигателя превышает амплитудное значение ЭДС источника электроэнергии по модулю. Между тем, при анализе режима рекуперативного торможения в тиристорных электроприводах, как правило, рассматривается не амплитудное, а действующее или среднее значение ЭДС источника. Следовательно, режим рекуперативного торможения может быть реализован в более узком диапазоне изменения параметров электропривода, чем это предполагалось до сих пор классической теорией.
При малых значениях частоты вращения двигателя в рекуперативном режиме работы амплитудное значение ЭДС якоря значительно меньше амплитудного значения ЭДС источника энергии. В этом случае практически невозможно развить тормозной момент достаточной величины. Иными словами, в приводе, где реализована большая глубина регулирования по скорости, не представляется возможным осуществление максимального тормозного момента при малых значениях угловой скорости, поскольку внутреннее сопротивление двигателя и источника питания не позволяет обеспечить ток в цепи якоря, необходимый для развития максимального значения момента [2].
С другой стороны, наиболее эффективным способом поддержания скорости, близкой к ползучей, в генераторных режимах является использование торможения противовключением. В режиме противовключения при малых значениях ЭДС тиристорного преобразователя можно получить непрерывный ток за счет ЭДС двигателя и развить тормозной момент, достаточный для поддержания стабильной скорости.
В то же время технологическими условиями работы рассмотренных машин и механизмов востребован реверс, также осуществляемый в режиме противовключения [3-5].
Таким образом, для реализации четырехквадрантного ТЭП ПТ представляется целесообразным совместное использование генераторных режимов торможения противовключением и с рекуперацией энергии в сеть.
В связи с тем, что подавляющее большинство серийно выпускаемых комплектных ТЭП ПТ не предполагает наличия токоограничивающих резисторов в цепи якоря, в работе проводился анализ генераторных режимов и их характеристик без токоограничивающего сопротивления.
С целью исследования особенностей указанных генераторных режимов, определения рабочих областей их применения и обнаружения оптимальных границ перехода из одного режима в другой в программной среде MatLab 7.01 – Simulink 6.1. была разработана имитационная модель, представленная на рисунке 2.
Имитационная модель здесь разделена на следующие сегменты:
1 – трехфазный источник переменного напряжения, позволяющий учитывать как реактивные, так и активные составляющие его компонентов;
2 – субблок трехфазного двухкомплектного реверсивного полностью управляемого тиристорного преобразователя с блоком задания угла управления тиристоров;
3 – блок, моделирующий электрическую часть (сопротивление и индуктивность якорной цепи) машины постоянного тока;
4 – датчики тока и напряжения;
5 – субблок, моделирующий электромеханическую часть машины постоянного тока, с блоком задания активного раскручивающего момента;
6 – виртуальный измерительный комплекс для осциллографирования и дальнейшей обработки измеряемых сигналов с целью получения механических характеристик.
Фрагмент имитационной модели, формирующий электромеханическую часть машины постоянного тока, описывается следующей системой уравнений:
 (1) (1)
где Мдв – электромагнитный момент, развиваемый двигателем;
Мр – раскручивающий момент, приведенный к валу электродвигателя;
 – момент динамический; – момент динамический;
Ея, iя – соответственно ЭДС и ток якоря.
В имитационной модели были реализованы генераторные режимы, обусловленные наличием положительного раскручивающего момента, характерного для грузоподъемных установок, и отрицательного тормозного момента электрической машины [6]. Формирование активного раскручивающего момента, изменяющегося по линейному закону в функции времени в диапазоне от 0 до Мн, обеспечивает субблок subsystem2. При этом интенсивность изменения раскручивающего момента, так же как и угла управления тиристоров α и произведения kФ, определялась из условия необходимости минимизировать влияние динамических процессов, протекающих в электромеханической части двигателя, на статические характеристики электропривода.
Имитационное моделирование проводилось на примере получивших распространение, в том числе в горной промышленности, двигателей постоянного тока с независимым возбуждением серии 4ПФ сред-
ней мощности, характеристики которых приведены в таблице 2.
В результате экспериментов, проведенных в рекуперативном режиме, были получены три семейства механических характеристик для двигателей 4ПФ132L, 4ПФ160L и 4ПФ180L при изменении угла управления тиристоров инверторной группы от 90 до 140. В процессе моделирования раскручивающий момент изменялся в диапазоне от 0 до номинального значения Mн, соответствующего каждому типу электрической машины.
В ходе имитационных экспериментов также были получены три семейства механических характеристик ТЭП ПТ в режиме противовключения при отсутствии токоограничивающих резисторов в якорной цепи для второго квадранта механических характеристик. В этом случае угол управления тиристоров изменялся в диапазоне 90 – 120.
На рисунке 3 механические характеристики, соответствующие режиму противовключения, с целью выявления рабочих областей совместного использования рассматриваемых генераторных режимов совмещены с полученными ранее характеристиками рекуперативного режима.
На рисунке зона прерывистых токов рекуперативного режима находится в заштрихованных областях,
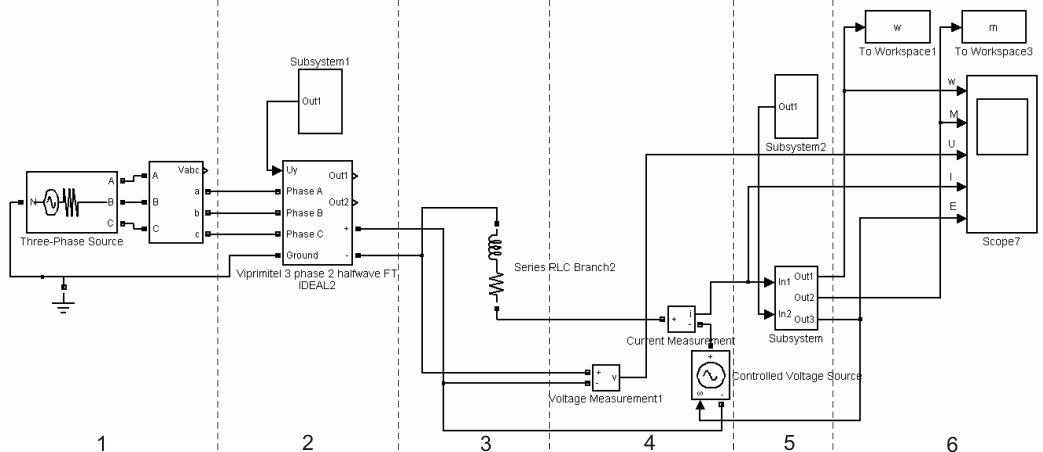
Рисунок 2 – Имитационная модель для исследования генераторных режимов ТЭП ПТ
Таблица 2 – Характеристики двигателей постоянного тока серии 4ПФ
Тип двигателя
|
4ПФ132L
|
4ПФ160L
|
4ПФ180L
|
Номинальное напряжение Uн, В
|
440
|
440
|
440
|
Номинальный ток якоря Iн, А
|
59,59
|
116,5
|
176
|
Номинальная мощность Pн, кВт
|
22
|
45
|
68
|
Электромеханическая постоянная двигателя Tм, сек
|
0,156857
|
0,164327
|
0,286001
|
Суммарное активное сопротивление цепи якоря RяΣ, Ом
|
0,623
|
0,2361
|
0,1741
|
Суммарное индуктивное сопротивление цепи якоря LяΣ, Гн
|
0,019483
|
0,023761
|
0,026834
|
Механическая постоянная двигателя Тя, сек
|
0,031274
|
0,10064
|
0,154132
|
Номинальная угловая скорость ωн, рад/с
|
157
|
157
|
157
|
Номинальный момент Mн, Н∙м
|
140,127
|
286,624
|
433,121
|
Произведение kФн, Вб
|
2,62735
|
2,56606
|
2,607378
|
Момент инерции ротора J, кг∙м2
|
0,140
|
0,300
|
0,789
|
страница 1 ... страница 2 | страница 3 | страница 4 страница 5 страница 6
|
Смотрите также:
Автоматика. Управление. Энергетика
345kb. 1 стр.
Энергетика. Автоматика. Управление
414,64kb. 6 стр.
Автоматика. Энергетика. Управление
605,43kb. 6 стр.
|
|