СПИСОК ЛИТЕРАТУРЫ
1. Деменков Н.П. Нечеткое управление в технических системах. Учебное пособие. М.: Изд-во МГТУ им.Н.Э.Баумана, 2005. 200 с.
2. Леоненков А. В. Нечеткое моделирование в среде MATLAB и fuzzyTECH. СПб: БХВ Петербург, 2005. 736 с.: ил.
3. Круглов В.В., Дли М.И. Компьютерная поддержка систем нечеткой логики и нечеткого вывода. М.: Физматлит, 2002.
4. Гостев В.И. Нечеткие регуляторы в системах автоматического управления. Киев: Радiоаматор, 2008. 972 с.
УДК 621.34:303.094.7
|
|
КАВЕРИН В.В.,
ЭМ Г.А.
| Имитационное моделирование полупроводникового электропривода постоянного тока |
В настоящее время в различных отраслях промышленности широкое распространение получил полупроводниковый электропривод постоянного тока (ППЭП ПТ) с двигателями средней мощности. Технологические особенности, а также нормативы безопасности, ГОСТы и др. документы для ряда машин и механизмов, оснащенных ППЭП ПТ, требуют реализации управляемых генераторных режимов работы привода. В этих условиях проектирование и надежная эксплуатация электропривода без знания его статических и динамических свойств невозможна.
Использование аналитических методов исследования характеристик ППЭП ПТ требует достаточно больших затрат времени. Современные средства имитационного моделирования, такие как пакеты прикладных программ (ППП) MatLab-Simulink, Multisim, ANSYS, позволяют решать задачи подобного класса значительно быстрее.
В настоящей работе рассматривается порядок проведения имитационных экспериментов в ППП MatLab 7.01 – Simulink 6.1 генераторных режимов работы электроприводов постоянного тока на примере двигателей независимого возбуждения серии 4ПФ в диапазоне мощности от 5,5 до 68 кВт. В качестве силового преобразователя используется в первом случае трехфазный полностью управляемый тиристорный преобразователь, а во втором случае – импульсный преобразователь повышенной частоты на силовых гибридных транзисторах (IGBT).
На рисунке 1,а представлена обобщенная структурная схема ППЭП ПТ с тиристорным преобразователем ТП, позволяющим обеспечивать работу привода как в двигательном, так и в генераторных режимах.
Здесь особенностью источника соизмеримой мощности (ИСМ) является наличие внутреннего сопротивления, величина которого соизмерима с эквивалентным сопротивлением нагрузки.
На рисунке 1,б изображена структурная схема ППЭП ПТ с широтно-импульсным преобразователем ШИП в режиме динамического торможения, которая характеризуется наличием блока ограничения напряжения БОН [1].
Каждая из представленных схем как объектов исследования представляет собой совокупность преобразователя, характеризующегося дискретностью действия, и электромеханической системы, процессы в которой носят непрерывный характер [2].
Задача исследования статических характеристик ППЭП ПТ – механических, электромеханических, регулировочных, а также динамических – переходной характеристики и логарифмических (ЛАЧХ и ЛФЧХ) для схем, изображенных на рисунках 1,а и 1,б, обусловлена как необходимостью синтеза систем автоматического регулирования, так и проектирования устройств защиты и ограничения предельных параметров электропривода.
Одной из особенностей статических характеристик электропривода постоянного тока, работающего совместно с ТП и ШИП, является необходимость учета влияния индуктивных компонентов цепи якоря на их характер. Средства ППП MatLab-Simulink позволяют автоматизировать исследование статических и динамических характеристик объекта путем формирования специальных входных воздействий с одновременной табличной регистрацией анализируемых параметров и графическим представлением результатов моделирования.
Использование ЛАЧХ и ЛФЧХ при исследовании электропривода позволяет линеаризовать компоненту его неизменной части «канал управления – электромагнитный момент, скорость (ток якоря)». Однако возможности набора инструментов ППП MatLab-Simulink ограничены при работе с дискретными моделями [3]. В связи с этим получение ЛАЧХ и ЛФЧХ моделей электропривода, содержащих ТП и ШИП, по каналу управления представляет достаточно большую сложность.
Важнейшим этапом в подготовке имитационного эксперимента является выбор численного метода решения и его оптимальных параметров, а также установка начальных условий в соответствии с поставленной задачей.
Исследование статических характеристик реализуется путем регистрации выходного параметра в функции аргумента, линейно изменяемого от 0 до максимального значения на протяжении установленного времени моделирования с последующим анализом полученных результатов.
В этих условиях предлагается следующая методика проведения имитационного эксперимента с автоматизированным определением статических характеристик электропривода в ППП MatLab-Simulink.
1. Выбор метода интегрирования. Для нелинейных динамических звеньев типа «силовой полупроводниковый преобразователь» рекомендуется использование метода ode23tb – одношаговый явный метод Рунге-Кутта 2-го и 3-го порядка [4].
2. Выбор шага интегрирования. С целью минимизации времени проведения эксперимента целесообразно применение метода интегрирования с переменным шагом. Опыт проведения имитационных экспериментов с силовыми полупроводниковыми элементами позволяет рекомендовать ограничение только максимального значения шага интегрирования, в этом случае минимальный шаг интегрирования задается автоматическим.
Значение максимального шага интегрирования выбирается из следующих условий:
- шаг не должен превышать 0,1 минимальной постоянной времени исследуемой системы;
- для случая с ТП величина шага не должна превышать некоторого значения, определяемого из соотношений диапазона регулирования, частоты промышленной сети напряжения, режима работы и схемы силовой части электропривода;
- для случая с ШИП величина шага не должна превышать значения, определяемого из соотношений диапазона регулирования и частоты коммутации импульсного преобразователя.
В таблице приведены рекомендуемые значения максимального шага интегрирования для имитационного моделирования ППЭП ПТ машин и механизмов, рассмотренных в [5].
3. Обоснование допустимой погрешности измерения. Выбор абсолютной погрешности зависит от ожидаемых максимальных значений сигналов. Рекомендуемое соотношение составляет 0,01-0,001 максимального значения сигнала тока и напряжения в схеме [3].
4. Задание периода моделирования. Период моделирования задается начальным и конечным значениями времени протекания исследуемого процесса.
При снятии статических характеристик моделей, содержащих, в том числе типовые динамические звенья, интенсивность изменения задающего линейно изменяемого воздействия определяется необходимостью минимизировать влияние динамических процессов, протекающих в электромеханической части двигателя, на статические характеристики ППЭП ПТ.
На рисунке 2 представлена обобщенная функциональная схема имитационной модели ППЭП ПТ, предназначенная для исследования статических характеристик.
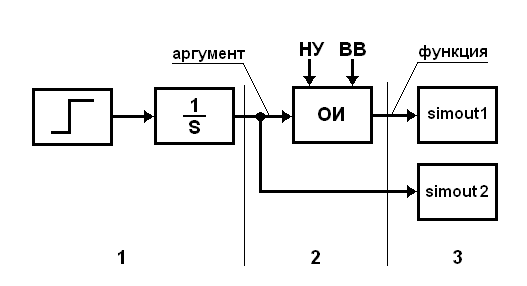
1 – формирователь задающего линейно изменяемого управляющего воздействия;
2 – ОИ – объект исследования, НУ – начальные
условия, ВВ – возмущающее воздействие;
3 – регистрирующий измерительный комплекс
Рисунок 2 – Обобщенная функциональная схема
имитационной модели ППЭП ПТ для исследования статических характеристик
