страница 1
Министерство образования и науки Республики Казахстан
Павлодарский государственный университет
им. С. Торайгырова
Факультет металлургии, машиностроения и транспорта
Кафедра машиностроения и стандартизации
СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ПРИВОДА ГЛАВНОГО ДВИЖЕНИЯ ТОКАРНОГО СТАНКА
Методические указания к выполнению лабораторной работы №1 по дисциплине «Металлорежущие станки» для студентов машиностроительных специальностей
(для внутри вузовского пользования)
Павлодар
УДК 621.9.06(07)
ББК 34.63-5я7 К41
Рекомендовано Учёным советом ПГУ им. С. Торайгырова
Рецензенты:
кандидат технических наук, профессор Дудак Н.С..
Составитель: кандидат технических наук, профессор И.А. Шумейко
К41 Составление кинематической схемы привода главного движения токарного станка: методические указания к выполнению лабораторных работ по дисциплине «Металлорежущие станки» для студентов машиностроительных специальностей (для внутри вузовского пользования)/сост. И.А. Шумейко. –Павлодар, 2006. –11 с.
В методическом указании с целью получения представления о кинематической схеме станка на основе условных обозначений, принятых в нормативной документации, и на конкретном примере, студентам предлагается составить кинематическую схему привода главного движения токарно-винторезного станка с определением передаточных отношений и частот вращения шпинделя.
Лабораторная работа является составной частью общего цикла лабораторных работ предусмотренных по дисциплине «Металлорежущие станки».
УДК 621.9.06(07)
ББК 34.63-5я7
©Шумейко И.А., 2006
©Павлодарский государственный университет
им. С. Торайгырова, 2006
1 Цель и задачи лабораторной работы
1.1 Цель лабораторной работы – получить представление о кинематической схеме станка на примере привода главного движения токарного станка со ступенчатым регулированием частоты вращения шпинделя с использованием некоторых принятых в станкостроении условных обозначений.
1.2 Задачи лабораторной работы:
- изучить настоящее методическое указание;
- используя приведенные в методическом указании условные обозначения, составить кинематическую схему привода главного движения токарного станка по имеющейся в лаборатории шпиндельной бабки с подсчетом чисел зубьев зубчатых колес;
- по заданному преподавателем варианту задания произвести расчет частот вращения шпинделя от минимальной частоты до максимальной;
- составить отчет.
2 Методические указания к выполнению лабораторной работы
Кинематическая схема – это условное изображение совокупности кинематических цепей в плоскости чертежа. В свою очередь, кинематическая цепь - это условное изображение совокупности передаточных устройств и механизмов в одной плоскости и связывающих движения каких-либо конечных звеньев станка. Передаточные устройства и механизмы обозначены контуром, подобным реально существующим устройствам и механизмам. К ним можно отнести такие устройства и механизмы как цилиндрические, конические и червячные зубчатые передачи, кулачковые и фрикционные муфты, различные тормозные устройства, ременные передачи, опоры и так далее. Наиболее часто встречающиеся условные обозначения приведены ниже:
В ал, ось, стержень, шатун и т.п. ал, ось, стержень, шатун и т.п.
Подшипники качения и скольжения
(без уточнения типа)
Радиальный подшипник скольжения
Подшипники качения:
радиальный шариковый подшипник
радиальный двухрядный роликовый подшипник
радиально-упорный шариковый подшипник
радиально-упорный односторонний роликовый подшипник
радиально-упорный двухсторонний роликовый подшипник
упорный шариковый подшипник
Соединение детали с валом:
подвижное для вращения
подвижное для перемещения вдоль оси
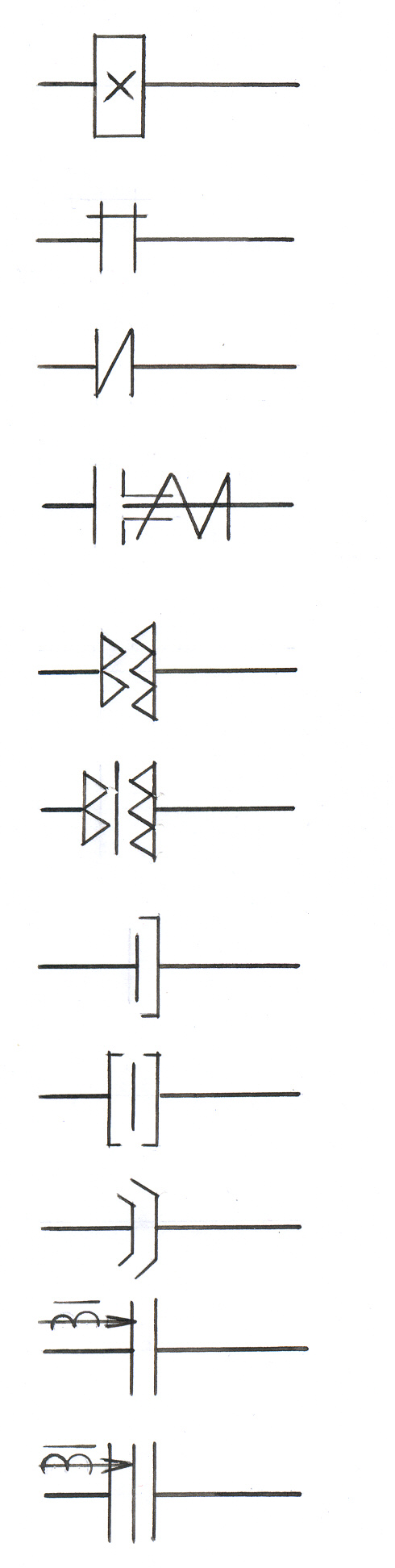
неподвижное
Соединение двух валов:
глухое
эластичное
предохранительной муфтой
Муфты сцепления кулачковые:
односторонняя
двухсторонняя
Муфты сцепления фрикционные:
дисковая односторонняя
дисковая двухсторонняя
конусная односторонняя
односторонняя электромагнитная
двухсторонняя электромагнитная
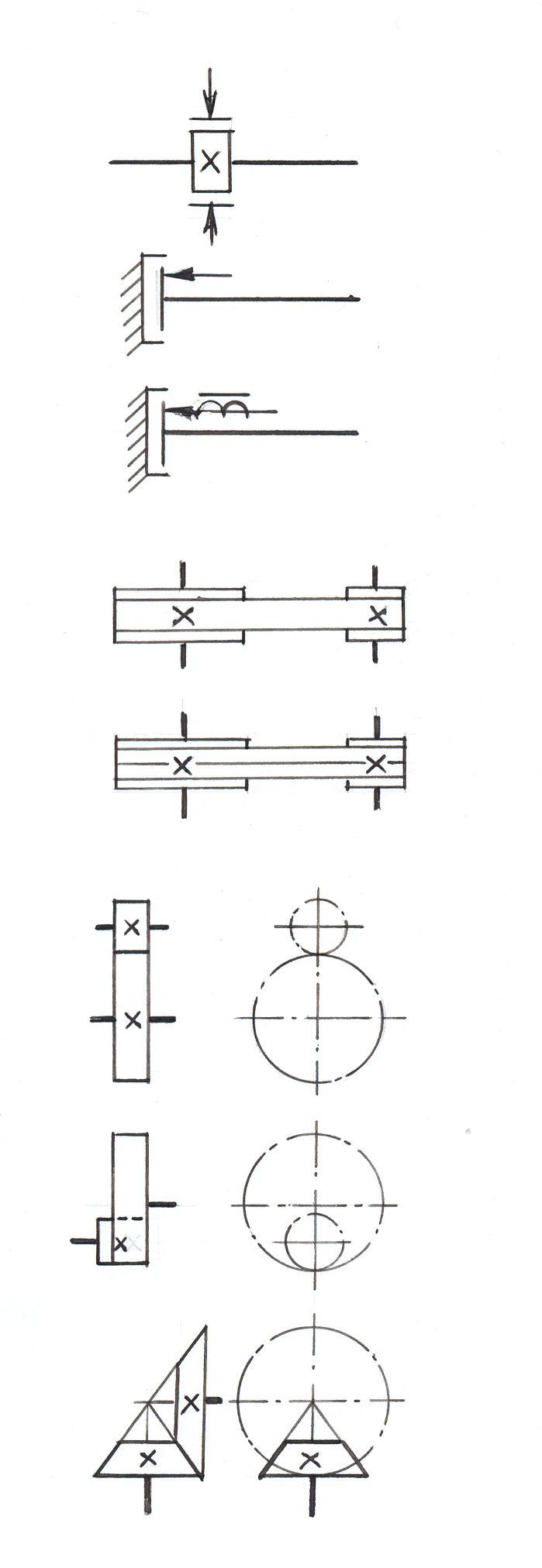
Тормоза:
ленточный
дисковый
дисковый электромагнитный
Передачи ременные:
с плоским ремнем
с клиновидными ремнями
Передачи зубчатые
цилиндрические:
с внешним зацеплением
с внутренним зацеплением
Передачи зубчатые:
передача зубчатая коническая
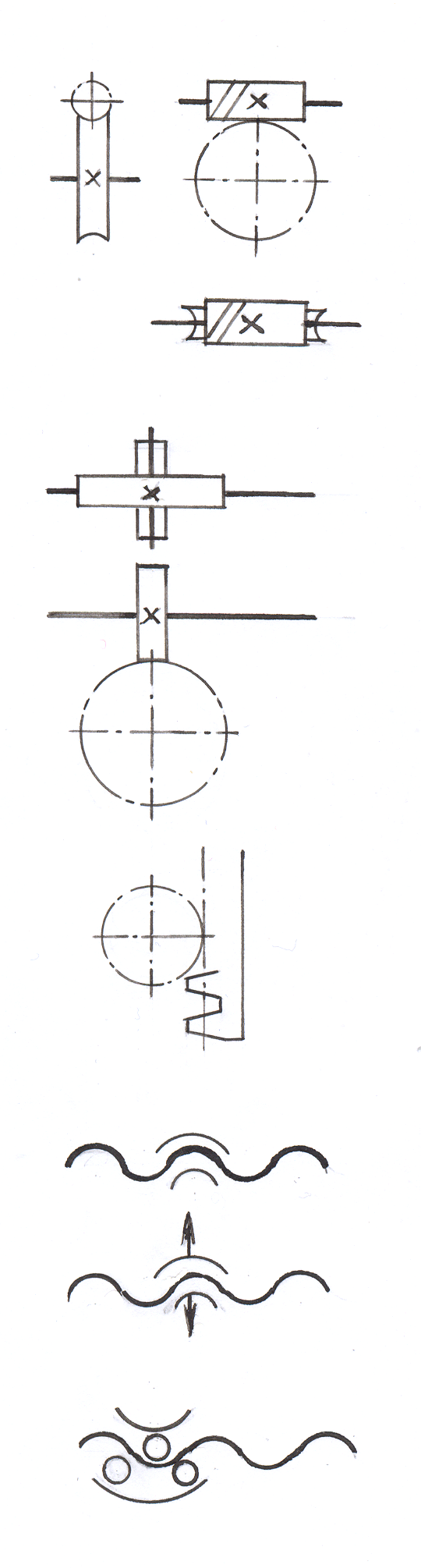
передача червячная с цилиндрическим
червяком
винтовая
реечная
Передача винт-гайка:
скольжения
скольжения с разъемной гайкой
качения
С помощью кинематической схемы реализуются принятый принцип работы станка и кинематические связи различных элементов и механизмов станка. При расчете движений в кинематике станков в качестве одной из основных характеристик передач используют передаточное отношение i, которое определяется как
 , ,
где n1, n2 – частота вращения соответственно ведущего и ведомого валов;
d1, d2 – диаметры ведущего и ведомого шкивов ременной передачи;
z1, z2 – числа зубьев соответственно ведущего зубчатого колеса (шестерни) и ведомого колеса.
Передача движений в станках осуществляется по кинематическим цепям. Каждая кинематическая цепь станка имеет определенное функциональное назначение и характеризуется видом выполняемого движения: цепь главного движения, цепь подачи, цепь деления, цепь обката и т. п.
Для расчета кинематических цепей используют уравнение кинематического баланса, которое связывает движения ведущего и ведомого конечных звеньев цепи. В качестве примера рассмотрим кинематическую схему привода главного движения обеспечивающего шесть ступеней частот вращения шпинделя (рисунок 1).
Р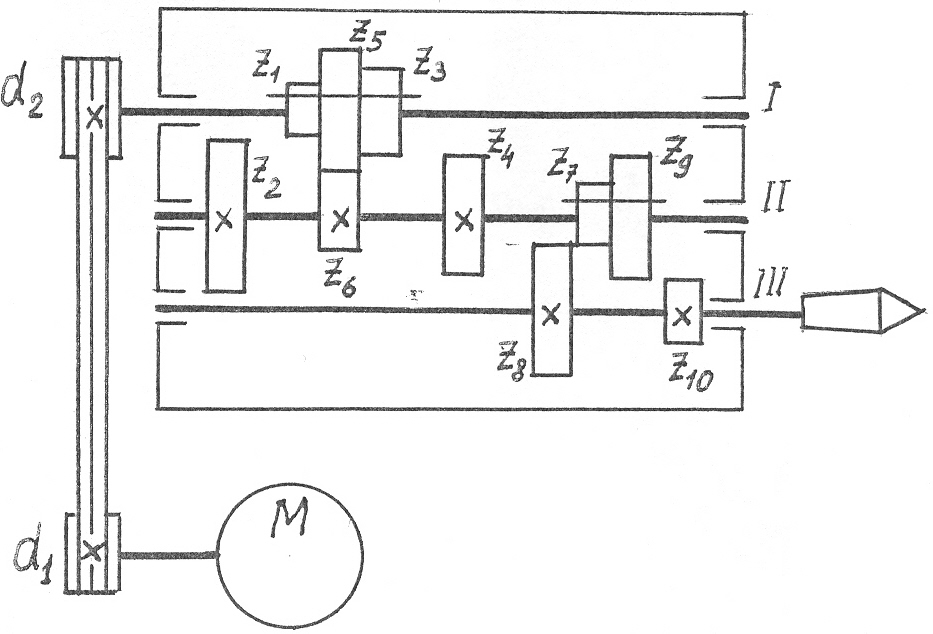
исунок 1
Движение от электродвигателя М через одиночную клиноременную передачу передается валу I коробки скоростей. Между первым и вторым валом коробки используется группа зубчатых колес из трех передач, сообщающих валу II три различные частоты вращения. Для передачи движения с вала II на вал III (шпиндель) используется группа передач из двух передач. Общее число ступеней частот вращения шпинделя в приведенном примере составляет
Z = 1·3·2 = 6 (1)
Запись (1) называют структурной формулой привода. Конечными звеньями в приведенной кинематической цепи (приводе главного движения токарного станка) являются электродвигатель М и шпиндель. Уравнение кинематического баланса (УКБ) обеспечивающего минимальную частоту вращения шпинделя для приведенного примера привода запишется в виде:
nэ·ipn· = nmin = n1, = nmin = n1,
где nэ – частота вращения электродвигателя, об/мин;
ipn – передаточное отношение ременной передачи (ipn =  ); );
 = i1 – передаточное отношение между зубчатыми колесами с наименьшим и с наибольшим числом зубьев в группе передач между первым и вторым валом; = i1 – передаточное отношение между зубчатыми колесами с наименьшим и с наибольшим числом зубьев в группе передач между первым и вторым валом;
 = i4 – то же между вторым и третьим валом (шпинделем) в приводе. = i4 – то же между вторым и третьим валом (шпинделем) в приводе.
Остальные передаточные отношения в рассматриваемой кинематической цепи будут иметь значения:
i2 = ; i3 = ; i3 =  ; i5 = ; i5 = . .
Для максимальной частоты вращения УКБ запишется в виде:
nэ·ipn· = nmax = n6; = nmax = n6;
Промежуточные частоты вращения могут быть определены из уравнений кинематического баланса:
nэ·ipn· = n2; = n2;
nэ·ipn· = n3; = n3;
nэ·ipn· = n4; = n4;
nэ·ipn· = n5. = n5.
В данной лабораторной работе, используя данные таблицы 1 согласно указанному варианту для составления кинематической схемы привода главного движения токарного станка, а также конкретные значения чисел зубьев зубчатых колес, необходимо произвести расчет частот вращения шпинделя последовательно от n1 = nmin до nz = nmax.
Таблица 1 – Варианты заданий
Параметры
|
Варианты
|
1
|
2
|
3
|
4
|
5
|
6
|
Частота вращения электродвигателя nэ, об/мин
|
950
|
1430
|
1000
|
720
|
2860
|
1400
|
Диаметр шкива
|
d1, мм
|
90
|
90
|
120
|
120
|
120
|
100
|
d2, мм
|
120
|
150
|
120
|
90
|
240
|
200
|
3 Содержание отчета
3.1 Цель работы
3.2 Условные обозначения, которые будут использоваться при составлении кинематической схемы привода, с расшифровкой.
3.3 Кинематическая схема привода главного движения токарного станка (по имеющемуся в лаборатории узлу).
3.4 Расчет частот вращения шпинделя согласно варианта задания.
4 Меры безопасности
4.1 Запрещается производить действия, которые могут привести к травмам: бесцельное вращение рукояток, валов и т.д.
4.2 Не следует дотрагиваться руками до механизмов коробки скоростей в момент вращения валов.
4.3 Запрещается действовать силой на коробку. Нарушение этого правила может повлечь опрокидывание стойки с коробкой. При необходимости поворота платформы с коробкой скоростей действовать очень осторожно одновременно двумя руками.
5 Контрольные вопросы
5.1 Зарисовать указанные преподавателем условные обозначения.
5.2 Записать структурную формулу привода.
5.3 Что понимается под уравнением кинематического баланса?
5.4 Записать указанное преподавателем уравнение кинематического баланса.
5.5 По указанию преподавателя начертить (от руки) кинематическую цепь на две, три, четыре или шесть ступеней частот вращения шпинделя.
Литература
1 А.С. Проников. Проектирование металлорежущих станков и станочных систем. Справочник-учебник в трех томах. Том 1 – Проектирование станков. М., Машиностроение, 1994г.
2 Н.С. Колев и др. Металлорежущие станки. М., Машиностроение, 1980г.
Содержание
1 Цели и задачи лабораторной работы 3
1.1 Цель лабораторной работы 3
1.2 Задачи лабораторной работы 3
2 Методические указания к выполнению лабораторной работы 3
3 Содержание отчета 10
4 Меры безопасности 10
5 Контрольные вопросы 10
Литература 11
УТВЕРЖДАЮ
Проректор по УР
ПГУ им. С. Торайгырова
__________Н.Э. Пфейфер
(личная подпись)
«____»____________2006 г.
Составитель: к.т.н., профессор И.А. Шумейко __________
Кафедра машиностроения и стандартизации
Утверждено на заседании кафедры «____»______2006 г. Протокол №_____
Заведующий кафедрой _________________ И.А. Шумейко
Одобрено методическим советом факультета металлургии, машиностроения и транспорта «____»_________2006 г. Протокол №_____
Председатель МС _____________________Н.С. Дудак
СОГЛАСОВАНО
Декан факультета _____________Т.Т. Токтаганов «___»_______2006 г.
Нормоконтролер ОМК _________ Г.С. Баяхметова «___»______2006 г.
ОДОБРЕНО УМО
Начальник УМО _____________ Л.Т. Головерина «___»______2006 г.
страница 1
|