страница 1 ... страница 2 | страница 3 страница 4
s^3 + 0.008383 s^2 + 5.502e-005 s + 8.819e-008
Обратите внимание на то, что у замкнутой системы отсутствуют нулевые полюса в знаменателе ПФ, хотя и имеется ПИ регулятор.
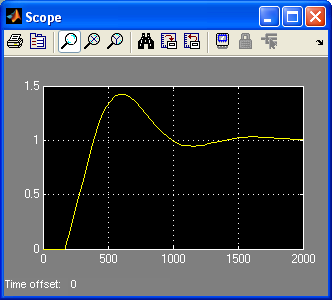
Построив с помощью функции step(имя_системы) или графического анализатора ltiview(имя_системы) переходную характеристику для заданной ПФ (рисунок 4.8), на вкладке Characteristics контекстного меню можно задать показ прямых показателей качества: максимума (Peak Response), времени регулирования (Settling Time), времени нарастания (Rise Time) и установившегося значения DC Gain (Steady State или Final Value).
>> step(sys), grid
Рисунок 4.8
При работе с графиком step в окне редактирования свойств Properties на вкладке Options (Characteristics) необходимо обязательно проверить действительные значения зоны Δ для оценки времени регулирования и интервала оценки времени нарастания, особенно при работе на компьютере общего пользования. Значения показателей качества определяются по табличке, формируемой при установке указателя мыши на маркеры графика, щелчок мышью табличку сохраняет.
Из графика время нарастания по диапазону (0,1-0,9) установившегося значения 182 с, время регулирования при ошибке 5 % равно 955 с, значение максимума 1.34 при времени достижения максимума 583 с, перерегулирование (Overshoot) 34.4 %, установившееся значение 1, установившаяся ошибка ε(∞) = 1 – 1 = 0. Система астатическая относительно скачка воздействия. Перерегулирование незначительно превышает допустимую норму 30 %, время регулирования удовлетворяет поставленным требованиям.
Провал в начальной части переходной характеристики отражает наличие задержки 170 с, характер провала зависит от выбранного порядка аппроксимации Паде (первый, второй и т. д.) в блоке транспортной задержки. Например, при четвертом порядке аппроксимации переходная характеристика той же системы регулирования имеет вид (рисунок 4.9) и показатели качества соответственно изменяются. Чем больше выбранный порядок Паде, тем сложнее передаточная функция системы, но тем ближе показатели качества к действительным.
Рисунок 4.9
Рассмотрим наиболее характерные ошибки, допускаемые при прямом анализе качества регулирования в дипломном проекте.
Если порядок аппроксимации Паде в звене транспортной задержки не задан (по умолчанию 0), отсутствует задержка в начальной части переходной характеристики – зачем же тогда в схеме моделирования было установлено звено чистого запаздывания? Все показатели качества изменяются.
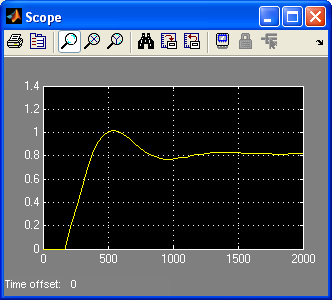
Заметим, что осциллограф Scope на выходе структурной схемы (рисунок 4.10) при моделировании переходного процесса правильно передает задержку даже при порядке ряда Паде 0 (рисунок 4.11 а), однако не позволяет получить автоматически показатели качества.
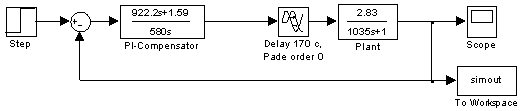
Рисунок 4.10
При использовании в схеме вместо заявленного ПИ регулятора инерционного звена образуется, как правило, статическая ошибка, т. е. установившееся значение переходной характеристики отличается от единицы (рисунок 4.11 б), на что автор выпускной работы зачастую не обращает внимания.
а б
Рисунок 4.11
Если на выходе схемы поставить блок To Workspace (simout), в котором задать способ вывода array (массив), то после моделирования процесса можно получить точный график с правильно показанной задержкой (рисунок 4.12).
>> plot(tout,simout), grid
Рисунок 4.12
В старой версии MATLAB показатели качества по этому графику придется определять самостоятельно, в поздних для этого служит функция stepinfo(sys).
Функция stepinfo(имя_системы) позволяет извлечь в виде структуры численные значения почти всех показателей качества без вывода графика (отсутствует только установившееся значение yfinal). Функция также имеет форму stepinfo(y,t,yfinal), т. е. может использовать любую временную характеристику, а если yfinal не задано, вместо него она использует значение на последнем отсчете.
Если величины зоны Δ SettleTimeThreshold и интервала замера времени нарастания RiseTimeLimits отличаются от стандартных (2 % и 10-90 %), их необходимо при обращении к функции указывать специально.
Параметры SettlingMin и SettlingMax характеризуют наименьшее и наибольшее отклонения кривой в динамике от установившегося значения с момента первого пересечения кривой с линией установившегося значения.
>> stepinfo(simout,tout,'SettleTimeThreshold',0.05,...
'RiseTimeLimits',[0.1 0.9])
ans =
RiseTime: 173.3530
SettlingTime: 1.2168e+003
SettlingMin: 0.9461
SettlingMax: 1.4262
Overshoot: 42.1290
Undershoot: 0
Peak: 1.4262
PeakTime: 595.7361
Следует отметить, что показатели, предоставляемые функцией stepinfo() для указанного переходного процесса, являются более точными, они отличаются от выводимых в графике step из-за влияния на последний неточности аппроксимации задержки рядом Паде.
В последних версиях MATLAB существует возможность получения достаточно точного переходного процесса без структурной схемы. Для этого зададим в символической форме обе передаточные функции – регулятора comp и объекта регулирования plant с задержкой в виде функции exp(-tau*s), замкнем последовательно соединенные звенья единичной отрицательной обратной связью с помощью функции feedback(). При этом до замыкания звенья с задержкой обязательно должны быть переведены в пространство состояний функцией ss(), обратно в ПФ такие блоки не трансформируются.
>> s=tf('s'); ‘ переход к символической записи
>> comp=(922.2*s+1.59)/(580*s); ‘ регулятор
>> plant=exp(-170*s)*2.83/(1035*s+1); ‘ объект регулирования
>> sys=feedback(ss(comp*plant),1) ‘ контур обратной связи
' модель в пространстве состояний с внутренней задержкой 170 с
a =
x1 x2
x1 -0.005314 -7.496e-006
x2 1 0
b =
u1
x1 0.0625
x2 0
c =
x1 x2
y1 0.06956 0.0001199
d =
u1
y1 0
(values computed with all internal delays set to zero)
Internal delays (seconds): 170
Continuous-time state-space model.
Результат содержит модель без задержки и отдельно хранимую внутреннюю задержку. Временные и частотные характеристики таких объектов рассчитываются гораздо точнее, чем при использовании аппроксимации Паде. Показатели качества регулирования (рисунок 4.13) ближе к результатам, представляемым функцией stepinfo().
Рисунок 4.13
Изменяются и значения запасов устойчивости (рисунок 4.14), становится видным характерное для транспортной задержки большой величины закручивание кривой вокруг начала координат.
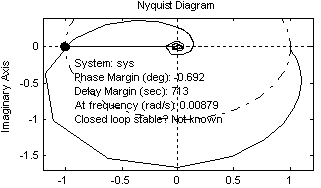
Рисунок 4.14
Если показатели качества регулирования или значения запасов устойчивости оказываются меньше установленных норм, следует выбрать параметры регулятора повторно и вернуться к оценке устойчивости и качества.
Литература
1 Экспериментальное определение динамических характеристик промышленных объектов управления / В. С. Балакирев,
Е. Г. Дудников, А. М. Цирлин. – М. : Энергия, 1967. – 232 с.
2 Основы теории и элементы систем автоматического регулирования : учебник для вузов / В. Ю. Каганов, Г. М. Глинков,
М. Д. Климовицкий. – М. : Металлургия, 1987. – 270 с.
3 Бороденко В. А. Практический курс теории линейных систем автоматического регулирования : учебно-методическое пособие. – Павлодар : Кереку, 2007. – 260 с.
4 Бороденко В. А. Исследование систем управления в среде Matlab. – Павлодар : Кереку, 2011. – 318 с.
Приложение А
(справочное)
Оформление штампа
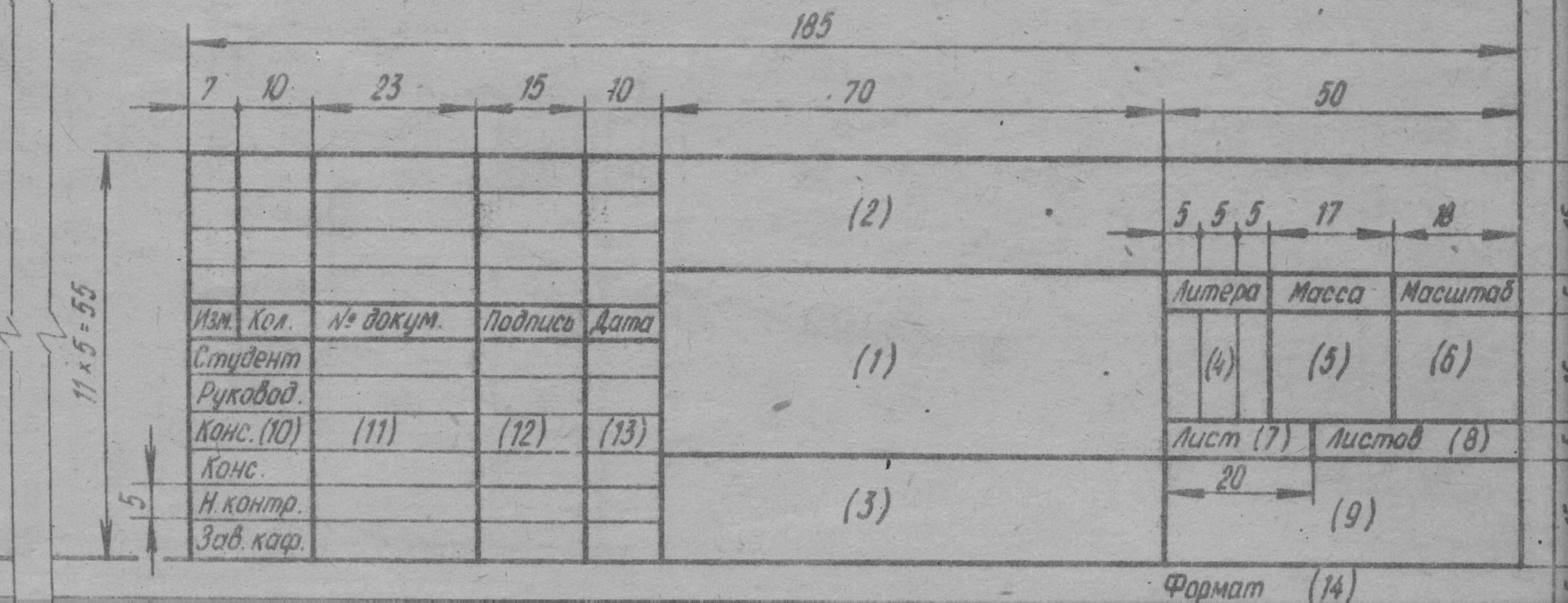
В графах основной надписи указывают:
- в графе 1 – тему выполняемого дипломного проекта;
- в графе 2 – буквенно-цифровое обозначение учебного документа;
- в графе 3 – название чертежа (схемы) или наименование изделия;
- в графе 4 – литеру, присвоенную данному документу ( У- учебный);
- в графе 5 – массу изделия по ГОСТ 2.109;
- в графе 6 – масштаб (проставляется по ГОСТ 2.302 и 2.109;
- в графе 7 – порядковый номер листа (на документах, состоящих из одного листа графу не заполняют);
- в графе 8 – общее количество листов выполняемого учебного документа;
- в графе 9 – сокращенное наименование института и группы;
- в графе 10 – характер работы, выполняемый лицом, подписывающим документ;
- в графе 11 – фамилии лиц, подписывающих документ;
- в графе 12 – подписи лиц, фамилии которых указаны в
графе 11;
- в графе 13 – дату подписания учебной работы.
Содержание
|
Введение ...........................................
|
3
|
1
|
Общие указания по дипломному проектированию .........
|
4
|
1.1
|
Содержание пояснительной записки .....................
|
4
|
1.2
|
Оформление пояснительной записки ....................
|
7
|
2
|
Идентификация объекта регулирования ..................
|
17
|
2.1
|
Традиционное построение математической модели ........
|
17
|
2.2
|
Построение модели с применением ЭВМ .................
|
27
|
3
|
Выбор параметров регулятора .........................
|
33
|
3.1
|
Выбор регулятора по данным объекта ...................
|
33
|
3.2
|
Выбор регуляторов на основании расчетов ...............
|
36
|
3.3
|
Выбор оптимальных значений параметров регуляторов.....
|
39
|
3.4
|
Проектирование регулятора в MATLAB .................
|
41
|
3.5
|
Работа с SISO Design Tool .............................
|
52
|
4
|
Оценка устойчивости и качества САР ...................
|
63
|
4.1
|
Оценка запасов устойчивости САР ......................
|
63
|
4.2
|
Оценка показателей качества регулирования ..............
|
68
|
|
Литература .........................................
|
75
|
|
Приложение А Оформление штампа ....................
|
76
|

страница 1 ... страница 2 | страница 3 страница 4
|