страница 1 страница 2 страница 3 ... страница 7 | страница 8
2.1 Преобразователи сопротивления
Преобразователи сопротивления изменяют активное сопротивление измерительной цепи под действием входной измеряемой величины.
Контактные преобразователи механические перемещения контактов преобразуют в замкнутое или разомкнутое состояние цепи, в которую эти контакты включены.
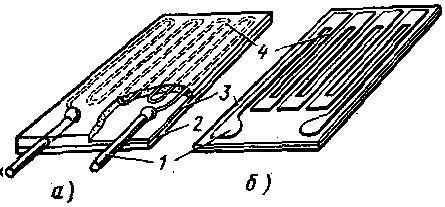
Простейшим контактным преобразователем является микровыключатель, сопротивление которого при перемещении подвижного контакта на определенную величину меняется от бесконечности до очень малой величины, определяемой значением контактного сопротивления. Абсолютная погрешность срабатывания контактных преобразователей находится в пределах 1…2 мкм. Для увеличения чувствительности контактных преобразователей используют рычаги, установленные на безлюфтовых листовых шарнирах (рисунок 1, а), или применяют плоскую пружину, теряющую продольную устойчивость под действием силы от измеряемого перемещения (рисунок 1, б).
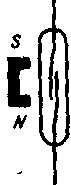
В качестве контактных преобразователей СТДМ успешно применяют и магнитоуправляемые герметичные контакты (герконы), представляющие собой две ферромагнитные контактные пластины, заключенные в стеклянный вакуумный баллон (рисунок 1, в). Состояние контактов (замкнутое или разомкнутое) изменяется под действием магнитного поля от постоянного магнита или электромагнита. В последнем случае геркон используют и как реле с очень стабильным переходным сопротивлением.
Потенциометрические преобразователи представляют собой переменные резисторы, перемещение движка которых связано с изменением измеряемой механической величины. Непосредственной входной величиной потенциометрического преобразователя является линейное или угловое перемещение, а при использовании промежуточного неэлектрического преобразователя и другие механические величины (сила, давление, ускорение).
Выходная величина потенциометрического преобразователя – сопротивление – связано линейной или нелинейной зависимостью с перемещением движка.
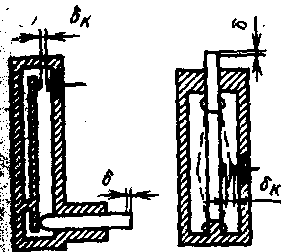
а) б) в)
а – с безлюфтовым листовым шарниром
б – с балкой, изгибающейся по продольной оси
в – магнитоуправляемый герметичный контакт (геркон)
δ – измеряемой перемещение
δк – перемещение контактов
Рисунок 1 – Контактные преобразователи
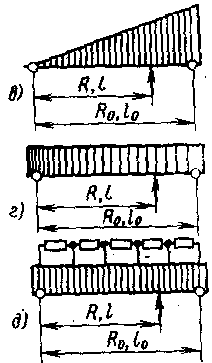
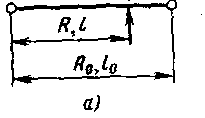
На рисунке 2 показаны потенциометрические преобразователи. Уравнение преобразования для линейного реохорда (рисунок 2, а):
 (2.1) (2.1)
где R0 и R – сопротивление реохорда и сопротивление между движком и одним из выводов;
l0 и l – длина активной части сопротивления реохорда и расстояние между концом активной части и движком.
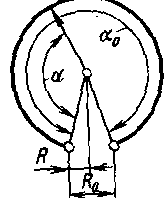
Уравнение преобразования для кольцевого реохорда (рисунок 2,б):
 (2.2) (2.2)
где α0 – центральный угол дуги реохорда;
α – угол поворота движка.
б)
Рисунок 2 – Потенциометрические преобразователи
Конструктивно потенциометрические преобразователи выполняют в виде реохорда (одиночной проволоки из высокоомного сплава, закрепленной на основе из изоляционного материала). Чаще потенциометрические преобразователи выполняют в виде обмотки, уложенной на каркасе из изоляционного материала.
В потенциометрических преобразователях рассчитанных для работы при нормальных температурах используют проволоку из константана, манганина, а при высоких температурах, - из фехраля и платиновых сплавов. В качестве материала каркасов применяют текстолит, стеклотекстолит, различные пресс-порошки. В промышленных преобразователях каркасы выполняют из алюминиевых сплавов, покрытых лаковыми или оксидными пленками. За счет высокой теплопроводности алюминия и при малых толщинах изоляционных пленок (~10 мкм) можно существенно повысить рассеиваемую на преобразователе электрическую мощность и тем самым получить большую на выходе преобразователя.
Для потенциометрических преобразователей, которые обычно применяют без усилителей, это имеет существенное значение. Каркасы могут быть выполнены в виде прямоугольной пластины, цилиндра, диска, кольца и т.д.
Тензисторы основаны на эффекте изменения сопротивления проводниковых и полупроводниковых материалов при их деформации или под действием давления. На рисунке 3 показаны конструкции проволочного и фольгового тензорезисторов. Проволочный тензорезистор (рисунок 3, а) представляет собой плоскую решетку из проволоки диаметром 20…30 мкм, зигзагообразно уложенную на изоляционную (бумажную или пленочную) подложку и приклеенную к ней.
 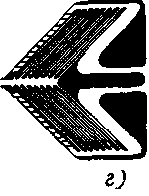
1 – выводы
2 – подложка
3 – клеевой слой
4 – решетка
Рисунок 3 – Тензорезисторы
Кроме металлических применяют полупроводниковые тензорезисторы на основе монокристаллов германия и кремния, а также тензорезисторы, в которых использованы тензо- и пьезоэффекты переходов в полупроводниковых приборах типа диодов и транзисторов. Полупроводниковые тензорезисторы отличаются очень высокой чувствительностью (ST≈100), однако это преимущество не может быть просто реализовано из-за существенного разброса их характеристик.
Особенности преобразователей сопротивления и применение их в СТДМ. Главное преимущество контактных и потенциометрических преобразователей - возможность получения сравнительно большой мощности на выходе, что позволяет использовать их с низкочувствительными приборами без промежуточного усиления, а контактные — без промежуточного преобразования сигнала. Дискретность контактных преобразователей в ряде случаев является важным преимуществом (например, при создании допусковых приборов). У потенциометрических преобразователей легко получить различного вида уравнения преобразования. С помощью потенциометрических преобразователей могут быть достаточно просто реализованы схемы аналогового умножения и сложения сигналов.
Преимущества тензорезисторов как первичных преобразователей - в возможности измерения с высокой точностью деформаций в диапазоне 10-7.
10-2 относительных единиц и в широком диапазоне частот (0...200 кГц). Тензисторы отличаются высокой стабильностью во времени и позволяют вести измерения в широком диапазоне температур.
Контактным и потенциометрическим преобразователям свойственны все недостатки устройств, содержащих замыкающиеся и скользящие контакты. Контактные преобразователи отличаются обычно наличием заметного гистерезиса. К числу недостатков потенциометрических преобразователей относится сравнительно узкий диапазон измерений ввиду высокого значения нижнего предела измерений, который у этих преобразователей определяется конечностью размеров подвижного контакта, а также дискретностью многовитковых потенциометров.
Проволочные и фольговые тензорезисторы имеют довольно низкую чувствительность; обычно выходные сигналы измерительных схем тензорезисторов не превышают нескольких милливольт при выходном сопротивлении от 50 до 1000 Ом. Однако этот недостаток не исключает их широкого применения, так как разработаны достаточно стабильные усилители и другие виды преобразователей малых сигналов, а относительно низкие значения выходных сопротивлений тензорезисторов не накладывают жестких требований на величины входных сопротивлений промежуточных преобразователей, как это имеет место при емкостных и пьезоэлектрических преобразователях.
Тензорезисторы в СТДМ используют в основном в качестве первичных электрических преобразователей, устанавливаемых на упругих чувствительных элементах, для измерения различных механических величин: сил и давлений в широком диапазоне, перемещений относительно небольшой величины (до 50мм), ускорений и виброперемещений при сравнительно низких (до нескольких килогерц) частотах изменения этих параметров. Перспективно применение тензорезисторов в качестве прижимных преобразователей, которые накладывают на трубопроводы и шланги гидросистемы при диагностировании для получения качественной картины пульсаций давления или определения временных характеристик различных переходных процессов в ОД.
Полупроводниковые тензорезисторы целесообразно использовать в тех случаях, когда измерения нужно проводить без применения усилителей, при измерении малых деформаций на небольших базах, а также для установки на чувствительные элементы миниатюрных преобразователей механических величин.
2.2 Емкостные преобразователи
Емкостные преобразователи представляют собой конденсаторы, у которых под действием измеряемой механической величины меняется один из параметров, определяющих их емкость:
 (2.3) (2.3)
где А – действующая площадь электродов (пластин), составляющих конденсаторов;
ε – диэлектрическая проницаемость диэлектрика, разделяющего электроды;
d – толщина диэлектрика (в частности, воздушного зазора).
Таким образом, входными величинами емкостного преобразователя могут быть изменения действующей площади электродов, расстояния между электродами и диэлектрических свойств среды, разделяющей электроды.
На рисунке 4 показаны основные схемы емкостных преобразователей.
Преобразователи с изменением действующей площади пластин. Преобразователи (рисунок 4, а, б) применяют для измерения линейных перемещений относительно большой величины. В преобразователе с плоскими пластинами (рисунок 4, а) емкость меняется при продольном перемещении пластин относительно друг друга. При этом
 (2.4) (2.4)
где ΔА=Δhb (h – высота рабочей зоны; b – ширина пластины) – относительное изменение емкости ΔС/С=ΔА/А.
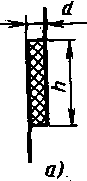
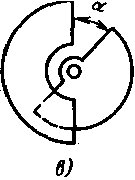
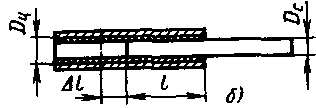
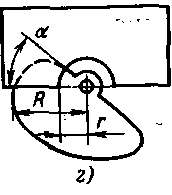
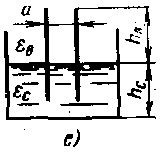 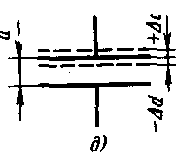
Рисунок 4 – Емкостные преобразователи
В цилиндрическом преобразователе (рисунок 4, б), состоящем из цилиндра и перемещающегося в нем стержня круглого сечения, емкость
 (2.5) (2.5)
где l – длина цилиндра;
Dц и Dc – внутренний диаметр цилиндра и диаметр стержня.
Преобразователи с вращающимися пластинами (рисунок 4, в, г) применяют для измерения угловых перемещений. Преобразователь, показанный на рисунке 4, в, имеет линейную зависимость емкости от угла поворота:
 (2.6) (2.6)
где С0 – начальная емкость;
α – угол поворота;
n - число пластин;
ψ – изменение площади на единицу угла поворота.
Преобразователи с меняющейся толщиной диэлектрика (рисунок 4, д). Емкость такого преобразователя рассчитывают по формуле (1). При изменении зазора на величину Δd приращение емкости
 (2.7) (2.7)
Знак приращения определяется направлением изменения зазора.
Преобразователи с различной диэлектрической проницаемостью (рисунок 4, е). В преобразователе этого типа верхняя часть конденсатора hb находится в воздухе (ε=1), а нижняя – в среде (εс>1), уровень которой hc измеряют.
К числу преобразователей с различной диэлектрической проницаемостью относятся также преобразователи (рисунок 4, в, г), у которых подвижная пластина выполнена из диэлектрика и расположена между двумя параллельными проводящими пластинами.
Особенности емкостных преобразователей и применение их в СТДМ. Достоинства емкостных преобразователей состоят прежде всего в возможности создания средств, работающих без механической связи с ОД. Емкостные преобразователи отличаются сравнительно малым обратным воздействием на ОД (за счет электростатических сил притяжения). Емкостные преобразователи просты по конструкции.
К числу недостатков емкостных преобразователей относится весьма большое значение выходного сопротивления при небольших абсолютных значениях емкости, что предъявляет жесткие требования к изоляции электродов преобразователя, их экранировке, к изоляции и экранировке соединительных проводов. На погрешность емкостных преобразователей оказывают влияние изменения влажности и температуры окружающей среды. В последнее время в связи с разработкой полевых транзисторов и микромодульных операционных усилителей стало возможным делать промежуточные преобразователи с весьма большим входным сопротивлением и очень малого объема. Это, в свою очередь, открыло возможность создания емкостных преобразователей, совмещенных в одном корпусе с промежуточным преобразователем.
В СТДМ емкостные преобразователи применяют для измерения малых линейных и угловых перемещений, виброперемещений, виброускорений, крутящих моментов (по углу закручивания), в качестве чувствительных элементов измерительных микрофонов при изменениях уровней шумов генерируемых ОД, в качестве источников стробирующих импульсов от вращающихся и перемещающихся составных частей ОД и для измерения частот вращения.
Преобразователи с различной диэлектрической проницаемостью применяют для определения изменения уровня топлива в составных частях топливных систем двигателей внутреннего сгорания, для измерения расходов гидравлических жидкостей объемным методом, а также для измерения крутящих моментов при выполнении подвижной пластины из диэлектрика.
2.3 Электромагнитные преобразователи
Электромагнитные преобразователи основаны на изменении характеристик магнитной цепи (сопротивления RМ, проницаемости μ, потока Ф) под действием измеряемой механической величины. К числу электромагнитных преобразователей относят индуктивные, трансформаторные, индукционные и магнитоупругие.
Индуктивный преобразователь представляет собой катушку с разомкнутым магнитопроводом, в котором под действием измеряемой механической величины меняется воздушный зазор или величина действующего сечения якоря. Выходным параметром индуктивных преобразователей является изменение индуктивности.
Для преобразователя с поперечным перемещением якоря (рисунок 5, а), если магнитное сопротивление воздушного зазора значительно больше магнитного сопротивления сердечника, можно записать
 (2.8) (2.8)
где L – индуктивность преобразователя;
ω – число витков катушки;
μ – магнитная проницаемость;
А – эффективная площадь воздушного зазора;
δ – величина воздушного зазора.
Для измерения больших перемещений применяют преобразователи соленоидного типа с продольным перемещением якоря (рисунок 5, б).
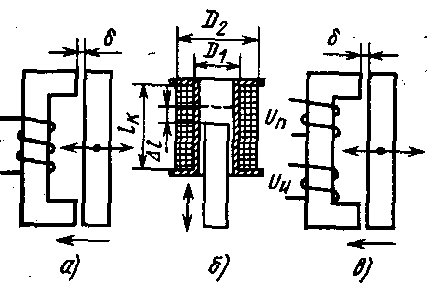 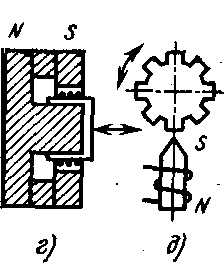
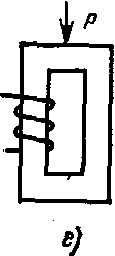
Рисунок 5 – Электромагнитные преобразователи
Индуктивность такого преобразователя с некоторым допущением пропорциональна объему введенного в катушку сердечника, т. е.
 (2.9) (2.9)
Зависимость изменения индуктивности от изменения воздушного зазора нелинейна. Практически линейную зависимость для этих преобразователей удается получить при Δδ/δ0<0,2, т.е. в пределах 0,1…2 мм.
Для измерения больших перемещений применяют преобразователи соленоидного типа с продольным перемещением якоря (рисунок 5, б). Такие преобразователи применяют для измерения перемещений до 50…60 мм. Для больших перемещений используют преобразователи с плоской катушкой и сердечником в виде плоской пластины треугольной формы.
В преобразователях с поперечным и продольным перемещением якоря для исключения начального сигнала и линеаризации характеристик применяют две обмотки, включенные по дифференциальной схеме.
Индуктивные трансформаторные преобразователи (рисунок 5, в). К первичной обмотке преобразователя подключен источник переменного тока с напряжением Uп. Вторичная обмотка соединена с измерительным прибором. За счет изменения взаимной индуктивности обмоток под действием измеряемой механической величины на выводах вторичной обмотки меняется уровень сигнала Uи.
Компенсацию начального сигнала в трансформаторных преобразователях получают за счет размещения на сердечнике двух вторичных обмоток, включенных по дифференциальной схеме.
Индукционные преобразователи относятся к подгруппе генераторных – в катушке преобразователя ЭДС индуктируется при ее колебаниях или вращении в поле постоянного магнита (рисунок 5, г). В другой разновидности индукционных преобразователей ЭДС в катушках индуктируется от изменения магнитного потока вследствие изменения сопротивления магнитной цепи (рисунок 5, д).
Магнитоупругие преобразователи основаны на эффекте изменения магнитной проницаемости ферромагнитных материалов от деформации под действием приложенных к ним сил. Преобразователи представляют собой чаще всего замкнутый сердечник с одной или несколькими катушками (рисунок 5, е).
Преобразователь с одной намотанной на стержне сердечника катушкой работает как переменное индуктивное сопротивление, величина которого меняется под действием приложенной к сердечнику силы Р.
Преобразователь, имеющий две катушки, может быть включен как трансформаторный с меняющейся взаимной индуктивностью между обмотками под действием прикладываемой к сердечнику силы.
Частотный диапазон измерений магнитоупругих преобразователей определяется в основном выбранной частотой тока питания, а не собственной частотой сердечника преобразователя, так как последний представляет собой колебательную механическую систему, имеющую достаточно высокую частоту свободных колебаний (до десятков килогерц).
2.4 Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи относятся к подгруппе генераторных и основаны на пьезоэлектрическом эффекте – способности некоторых материалов образовывать при механическом нагружении электрические заряды. Естественными кристаллами, обладающими пьезоэлектрическими свойствами, являются кварц и турмалин. Из названным материалов для пьезоэлектрических преобразователей используется кварц, так как турмалин является более редким и дорогим, кроме того, температурная зависимость пьезомодуля турмалина значительнее, чем кварца.
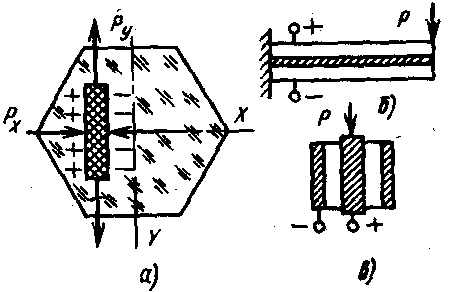
Рисунок 6 – Пьезоэлектрические преобразователи
Для получения пьезочувствительного элемента из монокристалла кварца вырезают диск или пластину таким образом, чтобы наибольшая плоскость вырезаемого элемента была перпендикулярна пьезоэлектрической (кристаллографической) оси кристалла. На рисунке 6, а показано сечение кристалла в плоскости, перпендикулярной оптической оси Z. Величина заряда при данном значении модуля зависит только от величины приложенной силы и не зависит от геометрических размеров вырезанного элемента.
В последнее время на базе полевых транзисторов и микромодульных схем выполняют согласующие усилители с весьма большим входным сопротивлением и очень малого объема, это позволяет совмещать в одном корпусе преобразователи с согласующим усилителем (так называемые пьезотроны). При использовании пьезотронов отпадает необходимость применения специальных измерительных кабелей и ограничение в длине соединительных линий. Хотя динамический диапазон и пределы рабочих температур пьезотронов ограничены возможностями согласующих усилителей, но обычно достаточны для большинства задач диагностирования машин в эксплуатационных условиях. В связи с созданием пьезотронов наряду с пьезокерамикой вновь начинают применять пьезоэлементы из кварца, которые при низком значении пьезомодуля обладают в 12…20 раз более высокой, чем пьезокерамики, температурной стабильностью.
В основном пользуются тремя схемами нагружения пьезоэлементов: работающими на растяжение-сжатие, изгиб и сдвиг. При работе пьезоэлемента на растяжение-сжатие обеспечивается большая жесткость преобразователя и, как следствие, высокая собственная частота. Пьезоэлементы, работающие на изгиб, имеют более высокую чувствительность, чем пьезоэлементы, в которых использовано растяжение-сжатие. Однако они существенно уступают последним по механической прочности и имеют сравнительно низкую собственную частоту. Пьезопреобразователи, работающие на изгиб, часто выполняют в виде биморфного элемента, состоящего из двух склеенных пластин, между которыми находится металлическая фольга (рисунок 6, б).
Одна из разновидностей пьезоэлементов, работающих на сдвиг (рисунок 6, в),- полый цилиндр из пьезокерамики, имеющий клеевое соединение с внутренним и внешним электродами.
Специальные типы пьезообразователей, рассчитанных для воспроизведения сигналов от статических и медленноменяющихся усилий, содержат два пьезоэлемента с двумя системами электродов. К входной системе подключают генератор электрических колебаний, а на выходной системе осуществляют измерение сигнала. О значении действующего усилия судят по амплитуде сигнала (пьезоэлектрические трансформаторы) или по сдвигу фазы входного и выходного напряжений.
страница 1 страница 2 страница 3 ... страница 7 | страница 8
|